自適應動態尋優控制系統仿真研究

摘 要:對采用自適應動態尋優方法的極值調節控制系統進行仿真研究,其目的是為解決在工業生產過程中若采用傳統的動態尋優方法就必須準確地辨識極值調節控制對象線性部分的參數這一無法回避的難題。對參數飄移的極值調節控制系統進行仿真研究,仿真結果表明,采用自適應動態尋優方法對極值調節控制對象線性部分模型的先驗知識要求很少,只需要知道極值調節控制對象的線性部分的階數就足夠了,在動態尋優的過程中不僅能夠自動辨識控制對象的參數,而且還能夠自動適應參數的飄移。從而可得出如下結論:在實際工業生過程中,若采用自適應動態尋優方法,根本不需要辨識極值調節控制對象線性部分的參數,而且還能夠自動適應參數的飄移。從而能有效地保證控制系統運行的連續性與穩定性。因此采用自適應動態尋優方法的極值調節控制系統將會在實際工業生產過程中發揮其強大的控制功能。
關鍵詞:系統仿真;自適應動態尋優;飄移;實用
對于極值調節控制對象,文獻提出一種自適應動態尋優方法,它成功地解決了使用傳統的動態尋優方法在實際工業生產過程中無法回避的一個難題,即保證極值調節控制系統運行的連續性和穩定性問題。因為若用傳統的動態尋優方法,當極值調節控制對象的參數飄移后控制系統就不能正確地進行動態尋優,就必須把控制系統停下來重新辨識極值調節控制對象的參數,再重新整定控制系統的參數。而自適應動態尋優方法最突出的優點就是在動態尋優的過程中不僅能夠自動辨識控制對象的參數,而且還能夠自動適應參數的飄移,因此有效地保證了控制系統運行的連續性與穩定性。而且這種自適應動態尋優方法對極值調節控制對象的先驗知識要求非常少,只要知道控制對象的階數就能始終正確地進行動態尋優。其主要思想如下所述。
1 自適應動態尋優方法簡要回顧
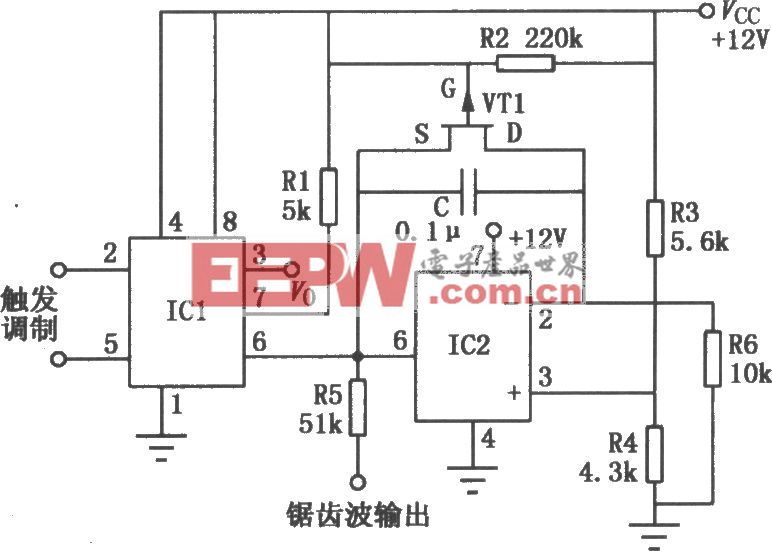
尋優系統采用步進式調節器,步進周期T0是固定的。極值調節對象可以分解為非線性環節與線性環節的串聯,如圖1所示。
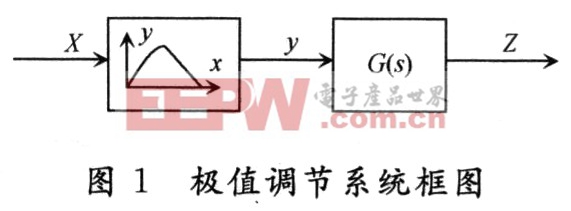
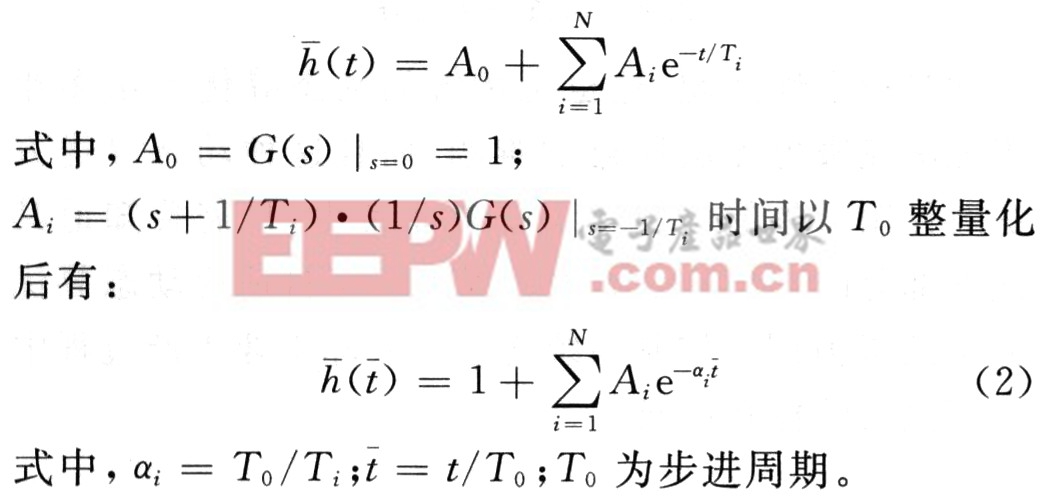
設極值調節對象線性部分的傳遞函數為:

單位階躍響應為:









評論