基于FPGA控制的懸掛運動控制系統設計

從鍵盤輸入起始坐標值(xd,yd),將(xd,yd)代入式(1)和式(2)中計算出L1和L2,再從鍵盤輸入終點坐標值(xe,ye)代入式(3)和式(4)中計算出L1'和L2',兩點(定點)運動算法流程圖如圖8所示。

3.2 做圓運動的算法和實現
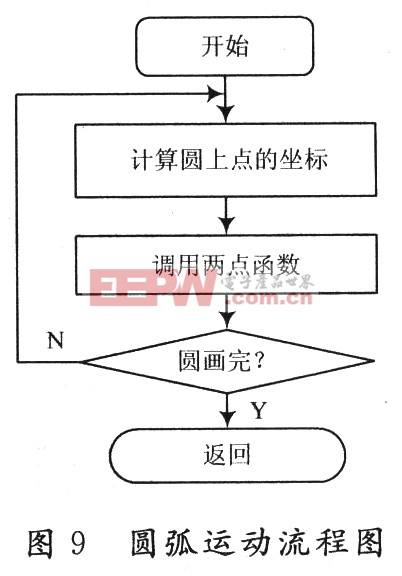
本系統設計指標懸掛物能夠畫一個圓,采用微分曲線直線逼近法,首先將圓周等分為N 份,將每小份弧線段等效為直線段畫出,N越大,曲線就越光滑。設所畫圓的圓心坐標為(x0,y0),半徑為25 cm,(x,y)為圓周上的任意一點,由此確定圓的方程為:(x-x0)2+(y-y0)2=252。若直接使用該方程來求圓上點的坐標,算法復雜;若采用圓的參數方程:X=x0+25cosθ,Y=y0+25sinθ,則圓的坐標僅與參數θ有關。因此,使角度以θ某一設定的角度步長ω累加,使θ+pω在周期[θ,θ+2π]內變化,其中p為累加值。這樣就可以采樣到圓上均勻的點,顯然,角度步長ω越小,在圓周上取得點越多,控制也會更精確。根據圓的參數方程,計算圓上點的坐標,通過調用定點程序來實現。畫圓流程圖如圖9所示。
4 結 語
系統硬件在智能型可編程器件實驗系統KH-310集成開發,軟件設計在QuartusⅡ環境下。系統各組成模塊通過Modelsim進行仿真,選用優化效率和兼容性好的綜合器Synplify對程序進行綜合,用A1tera公司的EPEC6Q24OC8L作為編程芯片,系統在1 MHz下工作,經現場實驗,其結果表明:該系統可以通過鍵盤任意設置懸掛運動物體的位置;在規定時間和運動區域的情況下,可以快速地完成運動距離;可以完成運動坐標點的顯示和電機啟/停功能。
本文設計的基于FPGA控制的步進電機懸掛運動控制系統具有可靠的硬件和優良的軟件設計支持,可實現對懸掛運動的精確定位。利用FPGA實時控制能力和步進電機的精確定位能力,完全可以設計出高性能高精度的控制系統,例如改善人工清洗高樓幕墻容易發生危險狀況,將懸掛物設置成清洗機構。在現代工業、農業和國防建設中,使用和推廣這種系統,有著十分重要的現實意義。













評論