基于FPGA控制的懸掛運動控制系統設計

引 言
在現代的工業控制、車輛運動和醫療設備等系統中,懸掛運動系統的應用越來越多,在這些系統中懸掛運動部件通常是具體的執行機構,因而懸掛部件的運動精確性是整個系統工作效能的決定因素,而在實際中實現懸掛運動控制系統的精確控制是非常困難的。靠改變懸掛被控對象的繩索長短來控制被控對象運動軌跡的懸掛運動控制系統,在生產控制等領域有很廣的應用范圍,但受技術上的制約,使用也有一定限制。傳統的懸掛控制系統設計是采用單片機作為系統控制器,通過軟件編程實現各種算法和邏輯控制,但由于其芯片資源有限,運算速率慢和易受干擾等因素,因而在較大系統的開發上受到限制。FPGA可實現各種復雜的邏輯功能,密度高,體積小,穩定性高,運算速度快,還可進行軟件仿真和調試,適合作為大規模實時系統的控制核心。本文采用Verilog FPGA設計懸掛運動控制系統的控制器,通過輸入模塊傳送控制參數,采用HDL語言編程實現的控制算法,驅動步進電機,對懸掛運動物體進行精確的控制。
1 系統設計方案
本設計具體設計目標為控制系統能夠通過鍵盤或其他方式任意設定物體坐標點參數,且物體在80 cm×100 cm的范圍內做自行設定的運動,運動軌跡既有曲線(圓),也有直線(任意兩點和定點),物體在運動時能夠在板上畫出運動軌跡,限制在一定的時間內完成。根據設計指標,需要實現勾畫設定軌跡和對設定軌跡的搜尋功能,并能實時地顯示物體中畫筆所在位置坐標。其系統方案框圖如圖1所示。
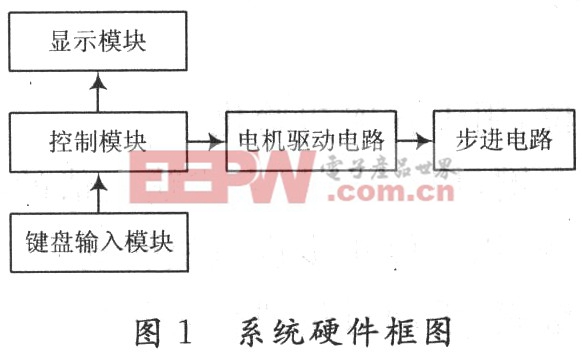
控制模塊是整個系統的核心,鍵盤輸入模塊產生按鍵信號,按鍵信號送人FPGA對物體進行設置校正以及軌跡參數設定,FPGA對送來的信號進行分析、運算、處理,將控制信號輸送到電機驅動模塊,控制電動機的轉速,使物體的運動軌跡得以控制,同時由顯示模塊顯示物體中畫筆的坐標。
2 系統各模塊的設計與實現
2.1 控制模塊
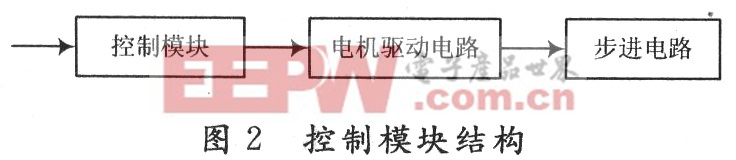
系統結構圖如圖2所示。其中,控制模塊是系統設計的核心,由FPGA實現。此模塊是通過HDL硬件描述語言,在智能型可編程邏輯器件開發試驗系統KH- 310的硬件平臺來控制設計的,利用FPGA芯片可實現對步進電機的控制功能。功能包括:步進電機的正轉、反轉、定位功能及調速等功能。FPGA由輸入的數據來計算物體要移動的距離,直接發出控制脈沖控制電機的轉動,進而控制物體的運動方向。由于少了反饋電路,系統的精度只與FPGA采用的算法準確性有關,此種方式電路結構簡單,成本低且易于調整和維護,是一種較理想的方式。
2.2 鍵盤模塊
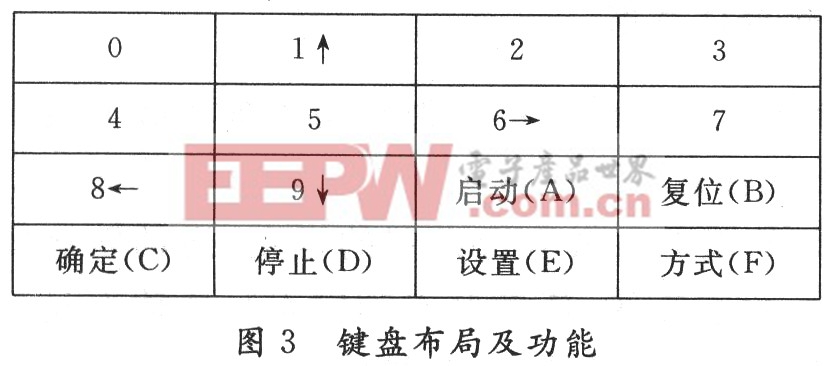
鍵盤是實現人機交流的一種裝置。在本系統中,采用4×4矩陣式鍵盤共陽極接法。鍵盤上的每一個按鍵其實就是一個開關電路,當某鍵被按下時,該按鍵的接點會呈現0的狀態設置鍵;反之,未被按下時則呈現邏輯1的狀態。鍵盤各鍵布局及功能介紹如圖3所示。













評論