Kaiman濾波算法在FPGA上的設計與實現

Kalman濾波理論在20世紀60年代一經提出,便得到了軍事、控制、通信等領域的極廣泛的應用。它可以實現隨機干擾下的線性動態系統的最優估計,目前Kalman濾波器的實現方式主要有兩種,一是在PC機上實現,可以同時滿足計算精度和實時性的要求,但是PC機體積大,質量重,成本高;二是通過DSP等芯片來實現,用這種方式實現的Kalman濾波器雖然體積小,質量輕,但是因其指令順序執行的CPU架構,在系統復雜時無法滿足系統的實時性要求。隨著控制系統的復雜性的提高,系統的階次變大,如組合導航系統的濾波,其濾波的階次一般都要18階,如果對系統進一步細化建模或增加其復雜性,其濾波階次可以達到幾十階。因此,Kalman濾波器在工程應用中的實現遇到了系統體積、重量、成本和系統精度、速度等性能不能兼顧的問題。隨著現代電子技術的發展,FPGA具有系統結構和邏輯單元靈活、集成度高以及適用范圍寬等特點,可以很好地解決這個難題。因為FPGA采用的是硬件并行算法,能很好的解決速度和實時性的問題,并且其具有靈活的可配置特性和優良的抗干擾能力,使得FPGA構成的數字信號處理系統非常易于修改、測試及硬件升級。隨著FPGA技術的不斷成熟,其內嵌資源不斷豐富,硬核乘法器和塊RAM的數目不斷增長,使得FPGA實現復雜的數字信號處理算法變得更為簡單和快速。因此,本文對FPGA技術和Kalman濾波算法進行結合研究,探索Kalman濾波算法在FPGA中的實現方式并進行性能驗證,以對基于FPGA的Kalman濾波算法的工程實現提供參考。
本文引用地址:http://www.104case.com/article/190405.htm1 Kalman濾波算法理論
Kalman濾波是在時域內以信號的一、二階統計特性已知為前提、以均方誤差極小為判據,能自動跟蹤信號統計性質的非平穩變化,具有遞歸性質的一種算法。它處理的對象是隨機系統,并能正確估計出有用信號。設離散系統差分方程如下:

則Kalman濾波方程組如下:
狀態一步預測方程:
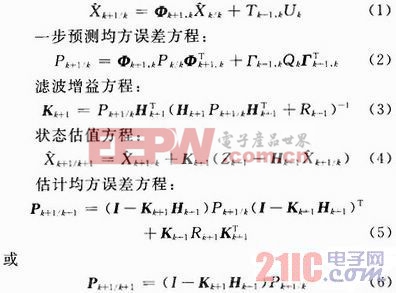
從式(1)~(6)可知,若利用傳統的處理器實現Kalman濾波算法,由于其指令執行的順序性,至少需要分為5步來實現,其中每一步還都需要進行至少1次的加法和乘法等運算,每次運算都要順序執行,其執行速度和效率很低;如果利用FPGA來進行Kalman濾波,根據其各步的邏輯關系,可以分為3步來實現,即第一步計算狀態一步預測值和一步預測均方誤差Pk+1/k,第二步計算濾波增益Kk+1,第三步計算狀態最優估值和估計均方誤差Pk+1/k+1。由此可知,利用FPGA技術可以實現Kalman濾波的并行計算,壓縮計算時間,提高解算速度。因此,對FPGA的Kalman濾波進行研究開發,可實現基于FPGA的快速Kalman濾波解算,滿足在對實時性要求更高的環境中使用。
2 在FPGA中實現Kalman濾波算法研究
由于FPGA實現Kalman濾波解算速度非常快,若利用FPGA的串行口依次輸入觀測值,由于數據串行輸入的特點,會使FPGA的解算部分等待數據接收完畢才能執行濾波解算,導致整體的解算時間過長。為檢驗FPGA實現Kalman濾波器的計算性能,本文預先將觀測值輸入并保存于FPGA內的ROM中,以使FPGA可以連續地進行濾波解算,實現方案原理如圖1所示。
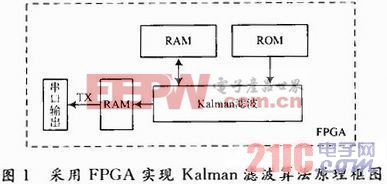
圖1中,Kalman濾波解算在FPGA內完成,RAM和ROM使用FPGA內嵌的硬件RAM存儲器,其中RAM暫存每步的中間結果,ROM存放濾波中的固定系數,如觀測矩陣、噪聲系數陣等。Kalman濾波的解算過程主要利用內嵌的硬核乘法器等資源來完成。因解算速度較快,解算結果暫存于一個稍大的存儲器內,同時通過串行口輸出到PC機上保存用于分析。該方案的關鍵問題是在FPGA中實現Kalman濾波算法。
FPGA實現Kalman濾波器,其實質就是控制數據的轉移和存儲并實現矩陣的相乘、加、減、求逆等運算。其中,數據的轉移控制需要有限狀態機(FSM)來完成,同時FPGA設計中,不可避免的會遇到資源與速度的問題。因此,需要對上述各關鍵技術進行研究和實現。
2.1 矩陣相乘在FPGA中的實現
Kalman濾波計算中最基本的步驟就是矩陣相乘。對于其中最常見的D=A×B×C型的矩陣相乘,有兩種實現方式:方式一,分步相乘;方式二,直接相乘。事先將矩陣A,B,C分別存入ROM1,ROM2,ROM3中,方式一中,首先進行兩個矩陣的相乘,多路選擇開關MUX選通ROM1和ROM2,依次讀取其中的數據進行乘加,完成前面兩個矩陣的相乘,結果存入ROMTEMP中;然后,MUX選通ROMTEMP和ROM3,利用前面同樣的資源,完成三個矩陣的連乘。方式二中,ROM1,ROM2,ROM3同時輸出數據,MUX根據解算需要配置乘法器和加法器的輸入,所有的過程同時進行。從上面的執行過程可知,方式一的執行需要占用更多的時間,而方式二的執行會占用更多的資源。對于上述N階的3個矩陣相乘,其占用資源和所需時間如表1所示。
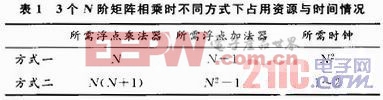
由表1可知,對于維數越大的矩陣相乘,需要的浮點加法器越多。由于浮點加法器的生成利用FPGA內的基本邏輯單元——可配置邏輯塊(CLB),所以其占用的CLB等資源也越多。這種現象在上述方式二中尤為突出。本文中研究擬先實現二階Kalman濾波器,階次較低,資源相對充足,為檢驗FPGA實現Kalman濾波器的快速性,選用第二種方式進行矩陣相乘,以得到最快的解算速度。













評論