磁浮列車模型定位系統的設計

3 系統的軟件設計
在該定位系統中,信號源來自磁控開關組,軟件設計的主要任務在信號處理模塊中。在數字電路中,時鐘脈沖信號是重要的信號之一。從經濟和電路體積結構上講,往往采用一個高頻品振產生一種高頻率的脈沖,再利用其他的分頻方法進行分頻,從而產生需要頻率的脈沖。本文采用30 MHz的品振經過千分頻得到需要的30 kHz。
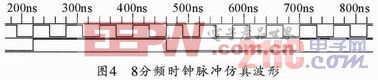
N分頻電路的設計思想是對輸入脈沖每N/2個周期響應一次,利用簡單的邊沿觸發來控制輸出,即對輸入脈沖進行計數,每輸入N/2個脈沖,輸出翻轉一次,則輸出脈沖頻率是輸入脈沖頻率的1/N倍,從而實現了N分頻。文中用上述方法經XilinxISE Simulator仿真得到8分頻時鐘脈沖仿真波形如圖4所示,波形圖中可以看出,分頻器采用了計數原理,得到了8倍分頻仿真效果。為了減少計數器占用的邏輯單元,計數器應使用最少的二進制位數,千分頻亦可用同樣的方法實現。本文引用地址:http://www.104case.com/article/190009.htm
基于FPGA的信號處理模塊的任務是獲得磁浮列車的區間位置量。首先建立區間位置與磁控開關的狀態編碼成的二進制數字序列之間對應關系列表,依據上述位置總線的狀態從18’b110xxxxxxxxxxxxxxx到18’bxxxxxxxxxxxxxxx011。當磁浮列車的位置發生變化時,磁控開關組的狀態也發生變化,通過查表的方式得出區間內的位置,并通過數據總線傳送。
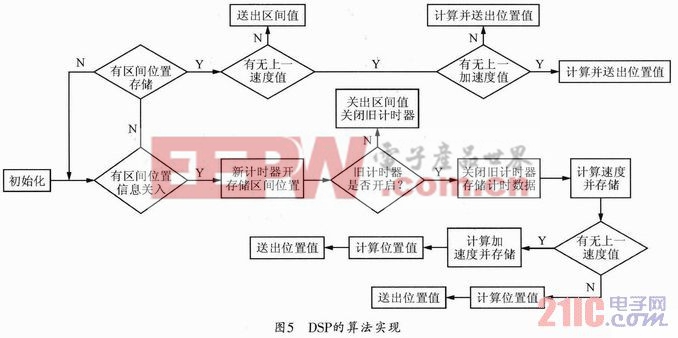
基于DSP的處理單元的任務是如何獲得磁浮列車的速度和加速度。當有區間位置信息輸入時得到圖5,開啟計時器,利用存儲的區間長度和計時時間可以求出磁浮列車的速度,然后利用前兩次存儲的速度值可求出列車的加速度,最后利用這些參數求出列車在區間的相對位置和速度,送入CAN總線。




評論