磁浮列車模型定位系統的設計

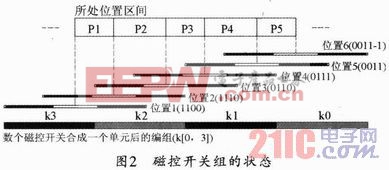
列車運行時,布置于線路上的磁控開關組的狀態能夠反映出列車的位置量,以四個通過并聯方式合并后的磁控開關組為例說明這一問題如圖2所示。磁浮列車向有行駛,上方的六根橫線表示列車的六個位置,這六個位置處于磁控開關變化的臨界狀態,橫線兩端的黑色部分為固定在車輛懸浮架上的電磁鐵,下方為四個合并后的磁控開關組。當電磁鐵與開關重合時,該開關被觸發。位置總線的狀態依次為:1100、1110、0110、0111、0011、0011-1,最后一個狀態需要加入第五個開關量。以列車的中心位置為參考,這六個狀態可以確定五個位置區間,即P1到P5。本文引用地址:http://www.104case.com/article/190009.htm
2 系統的硬件設計
將整個線路分為若干個區間,每個區間等間距排放并聯后的磁控開關組,并且配備有信號處理模塊和通信接口如圖3所示。因此每個區間具備獨立分析區間內的磁控開關組狀態的能力,把磁控開關組的變化情況通過位置信號總線送入信號處理模塊,處理后能夠獲得列車在該區間內的相對位置量,并將此位置量由通信接口經CAN總線發送到控制中心,控制中心根據預先設定的此區間的位置信息最終確定列車的位置。當列年位于兩個區間的結合處時,兩段的通信部件會同時發出位置信號,由控制中心綜合分析得出列車的位置。
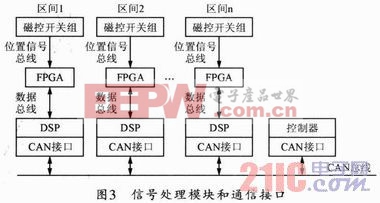
本設計信號處理模塊的核心硬件由FPCA和DSP組成,其中FPGA選用型號為XC2S50,用于處理由位置信號總線輸入的磁控開關的狀態量,從
而確定出列車所在的位置區間,并將運算結果由數據總線送入型號為TMS320C2812的DSP器件,用來計算列車的速度和加速度。并利用存儲的列車在前一區間的速度和加速度的值來計算出列車的位置,最后將位置值和速度量由CAN接口送入CAN總線。




評論