基于FPGA的車道偏離預警系統(tǒng)的設計

3 軟件流程
3.1 系統(tǒng)軟件流程
車道偏離檢測系統(tǒng)的軟件執(zhí)行流程圖如圖5所不。上電后,完成初始化,將EPCS中FPGA的相關配置信息及Flash中的程序配置入FPGA,并完成攝像機等系統(tǒng)部件的初始化。本文引用地址:http://www.104case.com/article/189559.htm
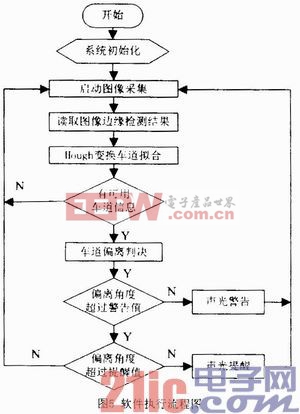
系統(tǒng)完成初始化后,進入車道偏離檢測及預警流程。啟動攝像機開始圖像采集,并調(diào)用FPGA內(nèi)部圖像處理模塊對圖像進行顏色空間轉(zhuǎn)換、灰度化、中值濾波、邊緣檢測等操作。
程序載入經(jīng)邊緣檢測的圖像后,將圖像分為左右兩部分進行直線檢測。考慮到在實際應用中,車道接近水平或垂直的幾率極小的事實,同時也為了濾除干擾(如地平線、路邊燈桿、前方車輛邊緣等),在利用Hough變換進行直線檢測的過程中采用了如下策略:在左半部圖像中,方向角在95°~175°之間進行直線檢測;在右半部圖像中,方向角在5°~85°之間進行直線檢測。搜尋過程遍歷整幅圖像,搜尋計算完畢,在累加器A(ρ,θ)中尋找局部極大值,由此確定車道標志線的位置和參數(shù)。
調(diào)用Hough變換函數(shù)進行直線的識別后,如果圖像處理后有可利用的車道信息,進入車道偏離預警及判決過程,車道偏離預警也采用兩級預警機制,當偏離角度大于警告值時,發(fā)出聲光警告;當偏離角度小于警告值但大于提醒值時,發(fā)出聲光提醒。若經(jīng)圖像處理后沒有相關車道信息則返回障礙物檢測與碰撞預警流程。
4 結(jié)語
系統(tǒng)充分利用了FPGA的可編程和SoPC系統(tǒng)可重構(gòu)的特點,系統(tǒng)升級維護非常方便,可以極大地延長系統(tǒng)的生存周期;同時采用以FPGA為核心的單芯片解決方案,外圍電路簡單,可以使系統(tǒng)的體積做得很小;另外,本系統(tǒng)還可通過自定義模塊、自定義指令、C2H等方式進行加速,其思想都是以犧牲硬件資源換取運算速度的提升。通過加速,可以做到圖像處理的實時性要求,從而進一步提高車道偏離檢測系統(tǒng)的實時性,提高系統(tǒng)的實用性。

fpga相關文章:fpga是什么









評論