線性預測濾波器在抗多窄帶干擾中的應用

2 線性預測濾波器在抗窄帶干擾中的應用
2.1 線性預測濾波器的抗干擾特性研究
為了更好地闡述自適應線性預測濾波器的抗干擾特性。假設一帶寬為20 MHz,信噪比為-32 dB的某擴頻系統,信號帶內出現了3個很強的點頻干擾,每個干擾的干信比都在57 dB,采用16階前后向的橫向預測濾波器,抗干擾前后信號頻譜如圖2所示。本文引用地址:http://www.104case.com/article/186153.htm
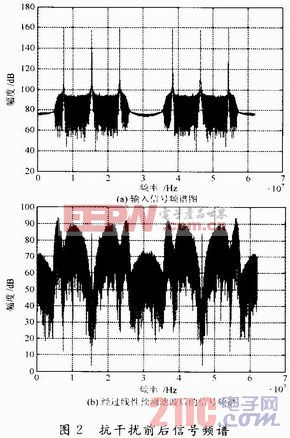
從濾波前后的頻譜卜看,對于3個較強的點頻干擾濾除較為徹底,在每個干擾位置處都產生了較深的陷波,較好地濾除了干擾,獲得干擾抑制增益為60.23 dB,輸出信噪比損失僅為1.9 dB,且當橫向濾波器的階數越高,預測的最佳抽頭系數能夠更加準確地重構出窄帶干擾,獲得的干擾抑制增益也就越高,當然付出的工程實現代價也隨著增大。
2.2 符號LMS遞歸求解實現
從式(5)可以知道,求解維納-霍夫方程的解涉及到矩陣求逆,而對于高達16階的矩陣求逆,工程實現的難度可想而知,因此工程上大多采用LMS,RLS等自適應算法來遞歸求解,LMS算法由于其工程實現難度小,魯棒性好的特點而得到廣泛應用,在這里采用LMS算法。
LMS算法的統一形式如下:
w(n+1)=w(n)-μ(n)(n) (6)
式中:w(n+1)為第n+1次更新的濾波器系數;(n)為第n次迭代的梯度,通常用適當的估計值![]() 代替,若用
代替,若用![]() =-2e(n)u(n)代替梯度的無記憶逼近,式中誤差信號e(n)為期望輸出d(n)與濾波器實際輸出之間的誤差,得到抽頭系數的更新式子如式(7)所示:
=-2e(n)u(n)代替梯度的無記憶逼近,式中誤差信號e(n)為期望輸出d(n)與濾波器實際輸出之間的誤差,得到抽頭系數的更新式子如式(7)所示:
這里需要說明的是,在線性預測濾波器中,輸出yi=xi-WTXi,d(n)為窄帶干擾信號,擴頻信號與噪聲與d(n)相互獨立,通過LMS重構的是接近于窄帶干擾信號的d(n),而不是能夠重構出你想要的擴頻信號,抗干擾完成是通過在實際系統中減去通過LMS迭代重構的窄帶干擾信號而實現的。
工程實現中LMS的自適應濾波器算法復雜度比較高,一個M階的濾波器在一個遞歸更新權值間隔內不僅要完成M次乘法濾波,還需要2M次乘法完成系數更新,這對于設計高階自適應濾波器來說,對FPGA乘法器資源要求較高,因此采用符號LMS算法顯得非常有必要。






評論