高速公路汽車追尾預警系統設計

2.5 電源模塊
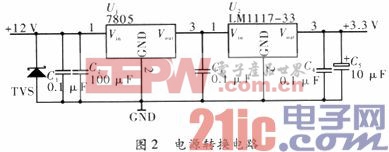
電源模塊負責給所有模塊供電。ATmega128L的工作電壓為2.7~5.5 V,ARS100—3的工作電壓為10~18 V,外圍電路工作電壓為3.3 V,汽車蓄電池的電壓為12 V,系統最佳工作電壓為3.3 V,因此需要將12 V電壓轉換為3.3 V。可以通過三端固定式集成穩壓芯片W7805和三端可調正穩壓器集成電路LM117~33實現。電源轉換電路如圖2所示。本文引用地址:http://www.104case.com/article/175828.htm
3 軟件設計
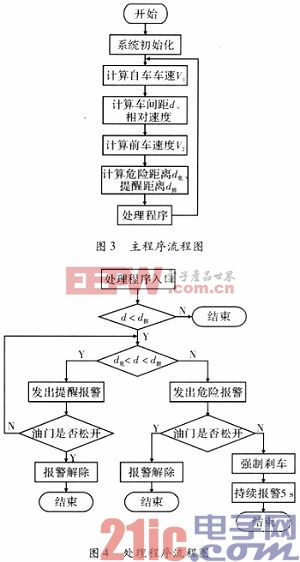
系統軟件采用匯編語言與C語言混合編程的方式,匯編語言用于系統啟動和初始化程序的編寫,計算、判斷、處理等程序采用C語言完成。系統主要包括主程序、初始化程序、相對距離和相對速度子程序、確定防撞模型子程序、處理子程序。主程序負責系統的啟動、初始化、根據具體情況調用相應子程序。相對距離和相對速度子程序用于確定自車和前方車輛之間的相對距離和相對速度。確定防撞模型子程序根據計算出的相對距離確定合適的防撞模型公式,計算出提醒距離和危險距離。處理子程序根據相對距離、提醒距離、危險距離確定自車當前狀態,采取相應措施。圖3和圖4分別是主程序和處理程序的流程圖。
4 結束語
文中結合高速公路交通事故頻發的現狀,設計了一套高速公路汽車追尾預警系統,該系統能夠有效降低交通事故的發生率。當然,能夠實現這一目的的方法有多種,但由于經濟成本過高,增加了車主的負擔。文中采用低功耗的AVR單片機做主控芯片,成本低廉,體現了經濟性和實用性的原則。

霍爾傳感器相關文章:霍爾傳感器工作原理
蜂鳴器相關文章:蜂鳴器原理 霍爾傳感器相關文章:霍爾傳感器原理










評論