單片機在汽車駕駛模擬器中的應用

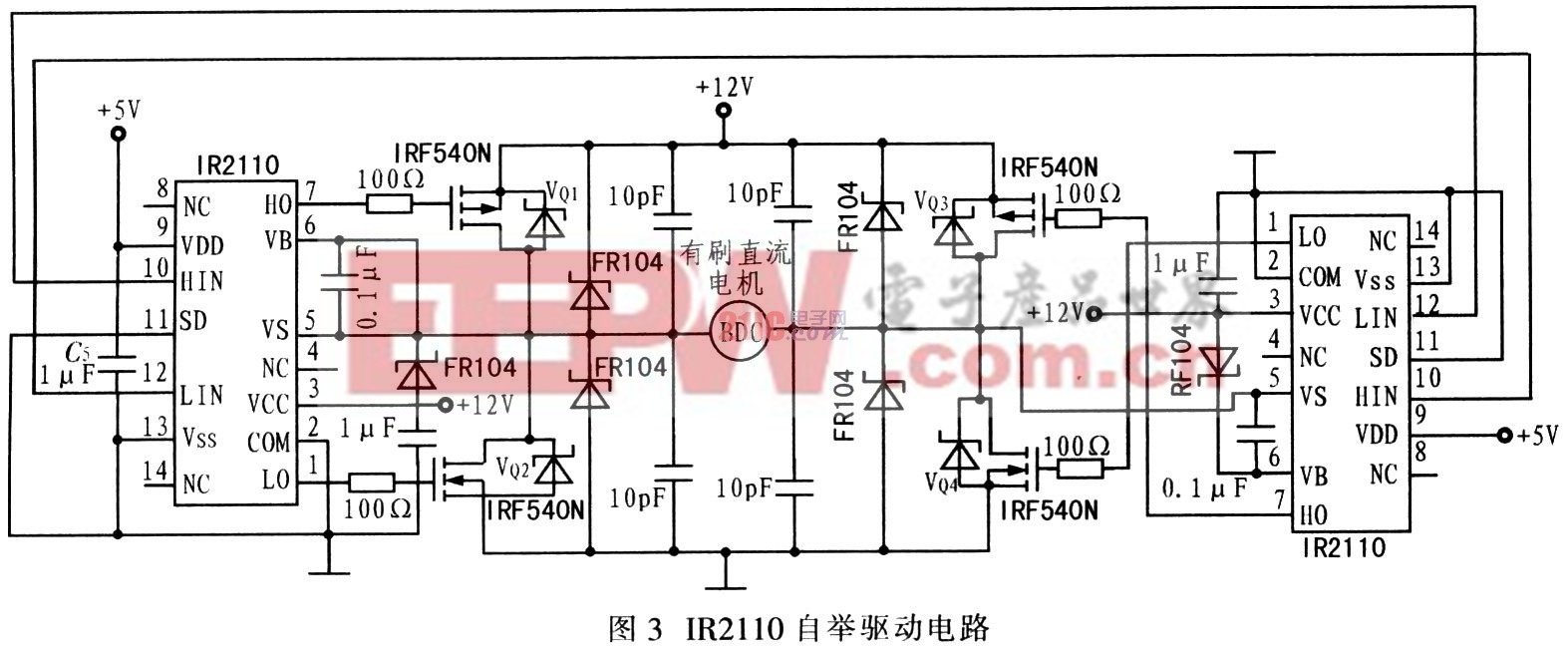
圖3中VQl、VQ3為P溝道MOSFET,VQ2、VQ3為N溝道MOSFET;電阻R1~R4用來保護器件不受損壞;二極管(VD1~VD4)是在MOSFET關斷時起保護作用,防止電動機的感應電流損壞MOSFET;電容器(C1~C4)的值通常小于10 pF,主要用于減少換向器換相引起的干擾。H橋工作模式與電機運行狀態的關系如表1所示。

3 計算機與單片機的通訊
計算機與單片機使用串口通訊,考慮到串口的輸出電壓高達十幾伏,而單片機正常工作電壓僅3.3 V,僅兼容5 V電壓,串口輸出為RS-232電平,而單片機為TTL電平,因此,應在串口輸出與單片機之間加一電平轉換電路。這里采用MAX3232實現電平轉換,其電路圖如圖4所示。
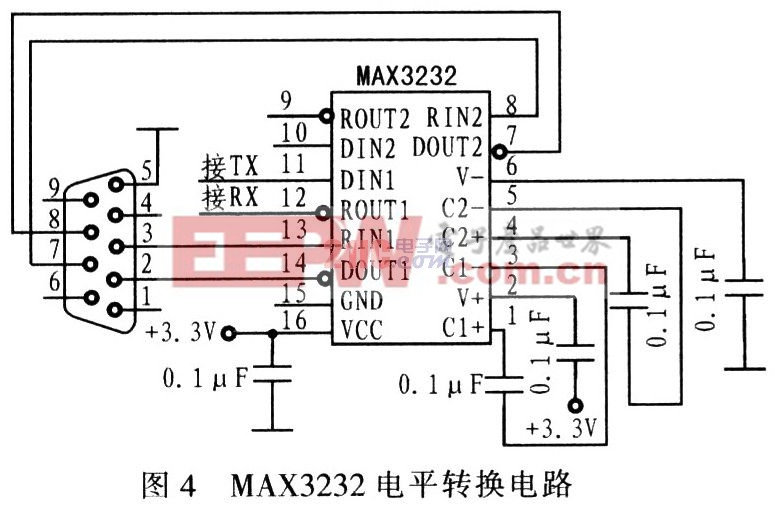
在設計該電平轉換電路時應注意以下幾點:1)電路中的電容為0.1μF,實際應用中如果MAX3232的引腳2和引腳6電壓達不到要求,則可換為1μF的電容,但使用中要注意正負極性。2)MAx3232的串口的引腳7與引腳8懸空。3)若MAX3232的引腳16接地電阻選用鉭電容,可用其正極接地,但作者經過數次試驗后發現電容發熱嚴重,故建議采用負極接地,且正極接地時若電壓過高有可能發生爆炸。
4 回正力矩的計算及模擬的實現
本系統選用直流力矩電機作為力矩輸出。直流力矩電機輸出力矩與電流的幅值成正比,所以調速系統的關鍵是控制電動機電流大小。電機力矩控制采用單片機的PWM方式改變電機的平均電壓,根據實際所需的電動機力矩計算所需的占空比,從而實時控制電機。
回正力矩的計算是由上位機完成的,上位機由測得的車速及方向盤的轉角,計算出此時方向盤上受到的回正力矩。上位機將計算得的數值通過接口傳送到單片機對力矩電機進行控制,同時力矩傳感器將電機的實際輸出力矩反饋給單片機的ADC模塊,如果實際值與計算值不符,計算機就用PID算法進行調速。最終使輸出與計算值相一致。

pid控制相關文章:pid控制原理
pwm相關文章:pwm是什么
單片機相關文章:單片機教程
單片機相關文章:單片機視頻教程
單片機相關文章:單片機工作原理
pid控制器相關文章:pid控制器原理
脈寬調制相關文章:脈寬調制原理










評論