武裝機動平臺測距避障系統設計

4 測距避障系統軟件設計
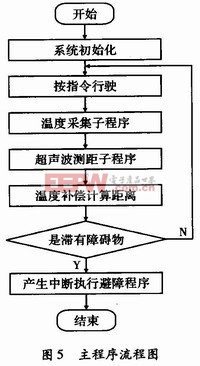
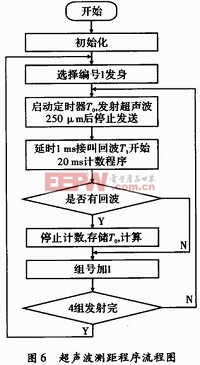
超聲波測距系統的軟件由主程序、超聲測距子程序、溫度數據采集子程序、顯示子程序等組成。主程序和超聲測距子程序的流程圖分別如圖5和圖6所示。主程序首先在上電復位后,完成STC12C5412AD單片機及其外圍功能模塊的初始化。然后調用溫度采集控制程序,讀取當前溫度值,并利用溫度補償程序,計算出當前溫度下超聲波的波速。接著依次啟動4路超聲波的發射,在超聲波發射過程中,屏蔽接收電路向單片機輸入信號。同時,使能定時器T1開始計時。超聲波每次發射10個周期的信號,耗時為250μs。由于超聲波在發射過程中會產生余波,同時
超聲波發射傳感器與接收傳感器相距較近,所以發射時會有部分余波未經反射直接繞射到超聲波接收傳感器上,引起系統誤差。為了避免誤差,采用延遲接收的方法,在超聲波發射完1ms后開放接收電路,并使能外部中斷,調用延時程序,等待超聲波回波,所以存在20 cm范圍內盲區。若有回波,則引起中斷,調用中斷服務程序,讀取T1計數值,經處理后,計算出距離,送LED顯示,同時把計算距離送至避障子程序入口,產生相應的避障指令,控制機動平臺的左轉、右轉、前進、倒退等動作。本文引用地址:http://www.104case.com/article/172975.htm
文中把上述電路和算法應用于武裝機動平臺的測距避障系統,進行了多次超聲波測距實驗,實驗結果如表1所示。

通過對實驗中測得數據分析比較發現,當平臺運動速率較低時,測量距離與實際距離間的誤差較小,當平臺運動速度增大時,測距誤差有所增大,基本達到了系統所要求的精度范圍。
5 結束語
本測距系統采用單片機作為主控芯片進行模塊化設計,充分利用其硬件資源,設計較簡單,軟件編程易實現。在硬件電路設計時,設計了4路超聲波收發傳感器采集障礙物信息,同時加入溫度補償電路,提高測量精度。在編制系統軟件時,考慮到超聲波測距過程的“盲區”問題,在虛假反射波到來之前這段時間內禁止接收中斷的發生,避開了虛假反射波帶來的干擾。實驗結果基本達到了系統所要求的精度范圍,
在武裝機動平臺系統上得到應用。








評論