武裝機動平臺測距避障系統設計

隨著社會暴力犯罪和恐怖活動呈上升趨勢,士兵面臨的威脅更突然、直接、致命,這對部隊人員使用的武器裝備提出了更高要求。戰場無人裝備作為一種功能強大、反應迅速、代價低廉、應用廣泛的多技術融合體,漸漸步人人們的視野。為了能夠實現移動戰場無人裝備的自主避障導航,必須建立移動戰場無人裝備的測距避障導航系統。用于戰場無人裝備測距避障的實現方法有多種,主要有超聲避障、視覺避障、紅外傳感器、激光避障、微波雷達等避障方法。其中超聲波傳感器以其信息處理簡單、技術成熟、運行可靠、速度快、性價比高和硬件實現方便等優勢,被廣泛地應用到移動戰場無人裝備的感知系統中。
以微控制器為核心的智能數據采集系統的興起,超聲波檢測裝置在其檢測精度、手段、應用范圍上實現了新的飛躍,廣泛應用于智能化檢測和機器人導航等領域。文中介紹了一種以單片機為主控芯片,采用多組超聲波傳感器采集障礙物信息,結合溫度補償原則,實現精確測距。該測距系統結合模糊控制避障算法,在自行設計的武裝機動平臺上得到實際應用,實現了武裝機動平臺的安全避障。
1 超聲波測距原理
超聲波測距技術是一種非接觸式的測量物體間距離的方法。它是基于無目視能力的生物防御及捕捉獵物生存的原理。通過不斷檢測超聲波發射后遇到障礙物所反射的回波時間,計算運動物體與障礙物間的距離。對距離的測定通常采用渡越時間法,即利用超聲波探頭向某一方向發射出超聲波,在發射的同時開始計時,當超聲波在介質中碰到被測物體,就會發生反射,探頭接收到反射波后立即停止計時,從而計算
出發射和接收回波的時間差△t,繼而根據超聲波在介質中的傳播速度C,計算出發射點到被測物之間的距離d=C×△t/2。
超聲波在空氣中的傳播速度和溫度有關,為了獲得較精確的聲速,必須引入溫度補償。對空氣而言,本文采用超聲波速度C與環境溫度T的關系按如下公式計算:![]() 。硬件設計中加入溫度補償電路,本文采用溫度傳感器DS18B20采集環境溫度送給單片機進行溫度補償,以修正聲速。
。硬件設計中加入溫度補償電路,本文采用溫度傳感器DS18B20采集環境溫度送給單片機進行溫度補償,以修正聲速。
2 測距避障系統總體設計
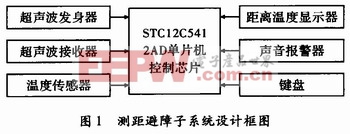
武裝機動平臺由運動行走子系統、火力控制子系統、偵察子系統、測距避障子系統組成,總體采用分級式控制方式,各子系統在中央處理器控制下完成相應工作。測距避障子系統是武裝機動平臺重要組成部分,在硬件設計上,采用主、從機結構,從機主要完成測距數據的采集處理,主機根據從機采集的距離信息完成復雜的避障算法,控制機器人的行走。從機主控芯片采用STC12C5412AD單片機,4組超聲波收發
傳感器采集障礙物信息,DS18B20溫度傳感器測定環境溫度,液晶1602顯示4組測定距離和環境溫度,其總體設計框圖如圖1所示。
編號1、2、3、4分別代表4組超聲波傳感器,武裝機動平臺的左右兩側各安裝1組,前方安裝兩組,分別用于感知各自方向上的障礙物信息,超聲波傳感器在武裝機動平臺上的分布如圖2所示。

溫度傳感器DS18B20用于感知環境溫度,把采集到的環境溫度送給單片機作溫度補償,提高測量障礙物與武裝機動平臺距離的精度,實現精準避障。
武裝機動平臺避障運動分為4種情況:(a)只有1、2兩組超聲波檢測到障礙物,此時小車向右運動,若3、4組測到障礙物則向相反方向運動。(b)當前方發現障礙物,1、4組均未檢測的障礙物時,令小車向右運動。(c)當4組超聲波都測到障礙物時,小車先倒退,然后向右運動。(d)若1、4檢測到障礙物而2、3沒有檢測到障礙物,小車并不改變方向仍按直線行走。







評論