多路舵機控制PWM發生器的設計與Proteus仿真

現以四路舵機控制為例來定義五個變量count,servo1,servo2,servo3,servo4。變量count用于對中斷計數,servo1~4用于存儲四個PWM信號的脈寬值,程序中使用0.05 ms的定時器周期,定時器每0.05 ms產生一次中斷,同時變量count加1,當count加到400時,表示20 ms時間到,count歸零重新計數,在每一次重新計數開始時,單片機的所有舵機控制I/O口置高,當count加到等于servo1時,控制舵機1的I/O口置低,這樣就會產生一個周期為20 ms,脈沖寬度等于servo1×0.05 ms的PWM脈沖,其他三路與之類似。servo1~4的值可通過按鍵輸入改變,因定時器周期為0.05 ms,故PWM可控脈寬步進值為0.05 ms,對應被控舵機的輸出角度步進4.5°。如果需要更小的步進值,只需改變定時器周期和幾個變量的值即可,如果需要更多路的PWM波輸出,也僅需相應增加幾個變量即可;如果需要更多按鍵來控制舵機輸出轉角,最好將按鍵接稱陣列式,這樣比較節省I/O口。經計算,當需要0.05 ms的計數周期時,應將THX和TLX都寫入0xCE。設4個舵機的信號端口分別為IO1~IO4,其中斷程序流程圖如圖3所示。
系統中的主程序包含定時器的設置與使能、按鍵檢測、變量賦值等,在此不再贅述。
4 系統仿真
在Proteus中繪制好電路,同時設置好相關參數,然后運行程序,即可直觀地看到程序執行結果,通過按鍵還可改變舵機的輸出角度。舵機輸出角度執行結果如圖4所示。本文引用地址:http://www.104case.com/article/172636.htm
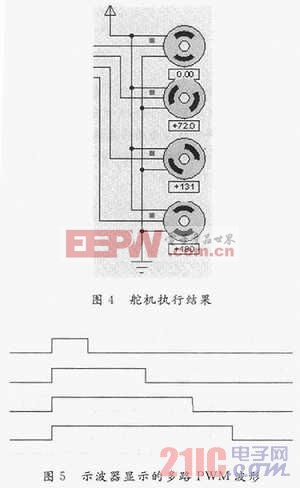
通過系統中連接的示波器可以顯示多路PWM波輸出結果。其PWM波形如圖5所示,圖中的方格橫向每格代表0.2 ms,縱向每格代表5 V。從示波器仿真結果來看,輸出的四路PWM波與四個舵機輸出轉角相對應,其波形都非常好。
5 結語
本文通過在Proteus中對電路的設計和Keil中對軟件的編寫,用51單片機實現了多路PWM脈沖的輸出,該系統具有硬件電路簡單、軟件可靠、資源節省等特點。可用于航模、機器人等設計制作過程中的舵機控制和輔助系統調試,也可以用于其他需要多路PWM脈沖的系統。

pwm相關文章:pwm原理









評論