基于數字PID增量控制的恒溫晶體振蕩器

摘要:針對晶體時鐘振蕩器輸出頻率易受外界溫度變化影響的特點,設計了以MSP430F4618單片機為控制核心的恒溫晶體振蕩器。將高精度負溫度系數熱敏電阻作為傳感器對晶體溫度進行采樣,并采用精密放大器IAN330芯片對晶體溫度變化差值信號進行轉換并輸出至控制核心。輸出的信號經12位A/D轉換后進行數字PID增量控制運算得到控制量增量,再通過12位D/A轉換輸出至DRV593芯片驅動半導體制冷片(TEC)對晶體溫度進行控制,并循環該過程使晶體振蕩器的工作溫度保持穩定。
關鍵詞:恒溫;晶體振蕩器;MSP430F4618;PID
0 引言
PID(Proportional Integral Differential)控制器是按給定量與輸出量偏差的比例、積分、微分進行控制的調節器,具有結構簡單、控制效果好、魯棒性強等優勢,是目前自動化控制技術中最穩定的控制方法,同時在許多工業控制中得到了廣泛的應用,單片機、DSP、FPGA等處理器易于實現數字PID控制算法,從而取代了傳統的模擬PID控制器,使系統電路更簡單、精度更高、通用性更強。由于軟件程序的靈活性,使數字PID控制算法也變得豐富多樣,可以根據實際系統的情況,選擇適合的數字PID控制算法,數字PID控制算法通常分為位置式PID控制算法和增量式PID控制算法,前一種算法所得到的控制量為全量輸出,每次運算都會對誤差進行累加,從而引起系統較大的超調,使系統穩定性下降;而后者輸出的則是控制量的增量,減小了累積誤差及精度問題對輸出控制量的影響。
恒溫晶體振蕩器(Oven Controlled Crystal Oseillator,OCXO)簡稱恒溫晶振,它在嵌入式系統中的應用有著重要的意義,傳統的恒溫晶體振蕩器采用恒溫槽使晶體溫度保持恒定,為了靈活的控制晶體的輸出頻率及達到更高的穩定性能,設計了基于數字PID增量控制算法的恒溫晶體振蕩器,并采用了TEC制冷技術,使晶體溫度的控制更加靈敏、準確和高效。
1 系統工作原理
整個系統對晶體溫度控制的總流程如圖1所示。基于TI公司MSP430單片機的優點,系統控制核心選用MSP430F4618單片機,信號采集轉換部分使用了高精度的負溫度系數熱敏電阻(NTC)與INA330芯片對晶體溫度偏差進行采集轉換,INA330芯片是基于10 kΩ熱敏電阻的溫度控制器,專為光網絡及醫學分析應用中進行熱電冷卻控制設計的精密放大器,它只采用了一個10 kΩ精密電阻器R2和10 kΩ熱敏電阻R1,為傳統的橋式電路提供了替代方案。
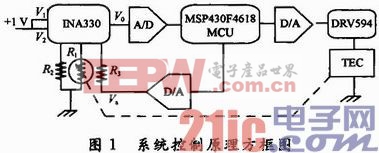
在INA330芯片的兩個輸入端V1和V2加上1 V的激勵電壓后,將在熱敏電阻R1和精密電阻器R2上產生I1和I2電流,芯片內部電流輸送電路輸出電流Io=I1-I2,該電流流經外部增益電阻器R3,任何加至R3另一端的偏置電壓都與輸出電壓相加,所以總的輸出電壓可以表示為:
V0=(I1-I2)×R3+Va (1)
該輸出電壓送至MSP430F4618處理器,通過芯片內部集成的12位A/D轉換器,使輸入的偏差模擬信號轉換為數字信號,通過數字PID增量控制算法得到控制量增量,經處理器內部集成的12位D/A芯片轉換輸出,控制DRV593輸出PWM波驅動TEC對晶體進行加熱或制冷,圖中虛線表示TEC到熱敏電阻形成一個閉環負反饋,兩者在機械位置上是同晶體安裝在一起的,在電氣連接上是相互隔離的。在實際應用中,晶體的實際溫度可以通過設置Va大小來進行控制。
2 系統硬件設計
在原理圖的設計中,根據設計的原理及所需要實現的功能模塊,參考文獻,將總的硬件電路劃分為電源模塊、LCD顯示模塊、控制核心模塊、TEC驅動模塊、INA330控制模塊,鑒于設計電路的復雜性,硬件設計采用層次電路繪制原理圖,這樣可以比較清晰和簡單地繪制原理圖,再檢查和核對各模塊就顯得有章可循,整個控制系統的頂層原理圖如圖2所示。
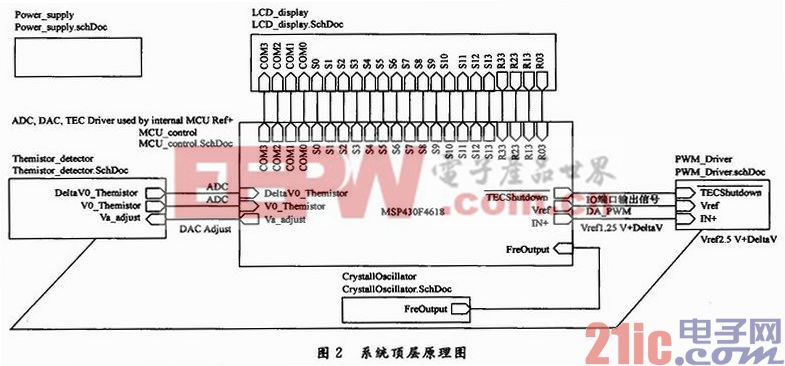
在具體的硬件電路中,INA330芯片與熱敏傳感器共同構成了晶體溫度誤差信號的轉換電路,控制核心電路則是MSP430F4618單片機的最小系統,該最小系統電路包括復位電路、電源電路、JTAG仿真接口、時鐘電路,其中MSP430F4618單片機采用直流3.3 V供電,LCD顯示采用段式液晶對晶體溫度值進行實時顯示,DRV593芯片及其外圍電路構成TEC驅動電路,通過設置DRV593芯片的負端電壓,可以調節TEC加熱或冷卻的閾值,向DRV593芯片正電壓端輸入控制信號,可以間接控制晶體溫度,在整個系統中,控制核心模塊與其他外部模塊間數模或模數信號轉變的參考電壓均使用單片機內部提供的參考電壓。

pid控制相關文章:pid控制原理
pid控制器相關文章:pid控制器原理
半導體制冷相關文章:半導體制冷原理
晶振相關文章:晶振原理 溫濕度控制器相關文章:溫濕度控制器原理



評論