基于模糊神經網絡的移動機器人沿墻導航控制

4 實驗結果
為了驗證算法的有效性,本文設計了移動機器人沿左墻行進的實驗。實驗環境為有兩扇門的長方形走廊。其中,黑色實線為帶有兩扇門的墻體,藍色曲線為移動機器人沿墻體行進的軌跡。移動機器人使用0#~4#聲納,圖2為基于航跡推算法的移動機器人墻體跟蹤軌跡圖;圖3為基于模糊神經網絡的移動機器人沿墻導航控制軌跡圖。本文引用地址:http://www.104case.com/article/163866.htm
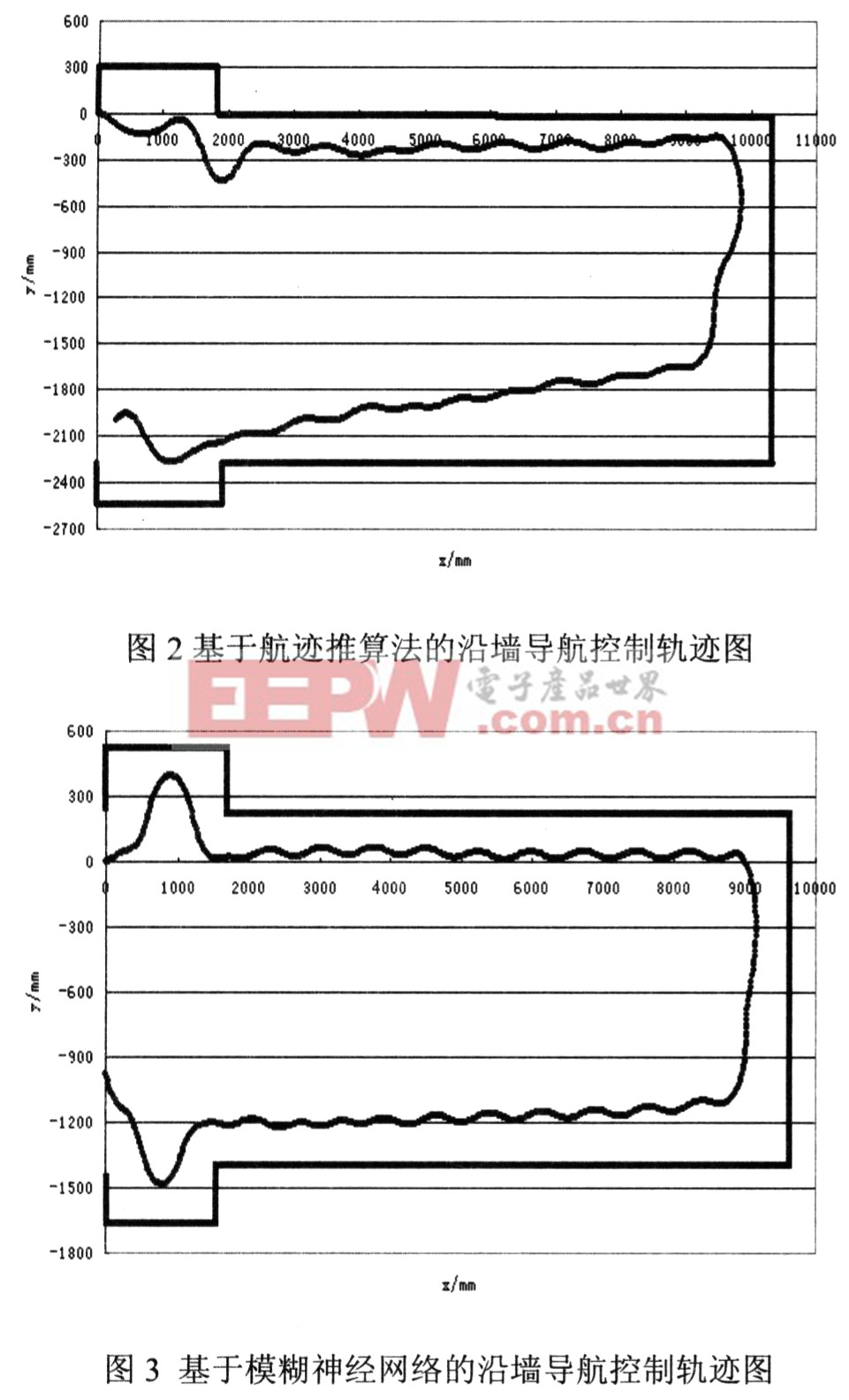
圖3中,移動機器人與墻體的距離聯合各聲納相對于移動機器人正前方的角度作為模糊神經網絡的輸入,經過融和判斷來控制移動機器人的動作,靠近墻體或遠離墻體。例如,O#(-90°)測得的數值為208mm,1#(-50°)測得的數值為324mm,2#(一30°)測得的數值為877mm,3#(一10°)測得的數值為1700mm,4#(10°)測得的數值為3000mm,說明移動機器人距離墻體太近,需遠離以避免碰撞,此時移動機器人左輪速度為0.20m/s,右輪速度為O.08m/s。移動機器人采用模糊神經網絡進行沿墻導航控制的均方誤差為0.0014。單一采用航跡推算法的均方誤差為0.0382。由此可見,采用模糊神經網絡進行移動機器人沿墻導航控制,性能大大提高。
5 結論
本文給出了模糊神經網絡的計算模型,利用BP網絡離線訓練權值。此方法能夠根據移動機器人聲納采集到的信息自動生成模糊隸屬函數,并且自動提取模糊規則,增強了神經網絡的泛化能力和容錯能力。實驗證明了此方法的有效性和可行性,能夠無碰撞地沿墻體行進,并保持一定的距離。










評論