DC/DC變換器數字PID控制方法研究

1 引言
本文引用地址:http://www.104case.com/article/163846.htm隨著DSP等數字信號處理器的出現,電力電子電路的數字控制得到了很大的發展。數字處理器能夠瞬時讀取變換器的輸出值,并快速地計算出控制值對變換器進行控制。由于數字控制可以采用靈活的控制策略,一些先進的控制方法應用于電力電子電路成為可能。隨著數字處理器價格不斷下降和性能的不斷提升,應用數字控制的開關型電力變換裝置會日益增多。未來電力電子的發展方向可以用“高頻化、數字化、綠色化、模塊化”來概括。
PID控制是最早發展起來的控制策略之一,由于其算法簡單、魯棒性好及可靠性高,被廣泛應用于各種控制中,尤其適合可建立精確數學模型的確定性系統。但實際的電力電子系統是一個線性和非線性相結合的系統,難以建立精確的數學模型。在實際調試過程中,PID參數往往整定不良、性能欠佳,適應性比較差,長期以來,人們一直在尋求數字PID參數的整定方法。本文根據變換器系統的硬件條件將采樣頻率調至極限值,提高系統的控制性能,運用極點配置的方法整定PID的比例、積分、微分系數,并通過MATLAB仿真修訂這些參數,得到良好的控制效果。
2 控制對象簡介
本文控制的對象為移相全橋零電壓開關變換器。主電路如圖1所示。這種變換器結合了零電壓準諧振技術和傳統PWM變換器技術兩者的優點,工作頻率固定,在換向過程中利用LC諧振使器件零電壓開關,在換向完畢后仍然采用PWM技術傳送能量,開關損耗小、可靠性高,是一種適合于大中功率開關電源的軟開關電路。
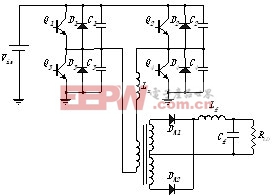
圖1 移相控制的全橋變換器
控制器為Motorola公司DSP芯片56F8323,開關頻率為150kHz,采用輸出電壓單環控制,電壓環采樣頻率為25kHz。電壓環中,采樣輸出電壓和計算輸出電壓偏差以及偏差變化,完成電壓環的PID計算,同時完成過壓保護等功能。計算結果作為移相角大小的依據,實現對變換器的控制。
在這里,為了建立一個形式簡單而且不依賴具體負載類型的DC/DC變換器的數學模型做如下一些假設:
①功率開關管是理想的器件;
②LC構成低通濾波器;
③高頻變壓器為理想變壓器;
④考慮開關管的的導通壓降、死區效應、線路電阻以及濾波電感的等效串聯電阻這些阻尼因素,綜合一個等效電阻為r。
3 兩種數字PID控制方法比較
數字控制是一種采樣控制,它只能根據采樣時刻的偏差值計算控制量,因此積分項和微分項需要進行離散化處理。以一系列的采樣時刻點kT代表連續時間t,以求和代替積分,以增量代替微分,可以得到離散的位置式PID表達式:
位置式PID控制算法流程如圖2所示。
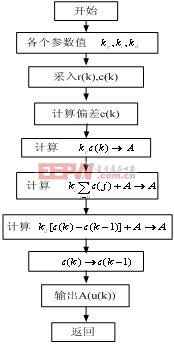
圖2 位置式PID控制算法流程圖
圖3 增量式PID控制算法流程圖

pid控制器相關文章:pid控制器原理





評論