基于有限狀態機的飛行器自毀系統時序控制設計

因此該設計采用狀態作為輸出信號且帶有復位信號的Moore型有限狀態機。其結構框圖如圖4所示。本文引用地址:http://www.104case.com/article/163781.htm

3 QuartusⅡ環境下有限狀態機的設計
3.1 系統總體結構
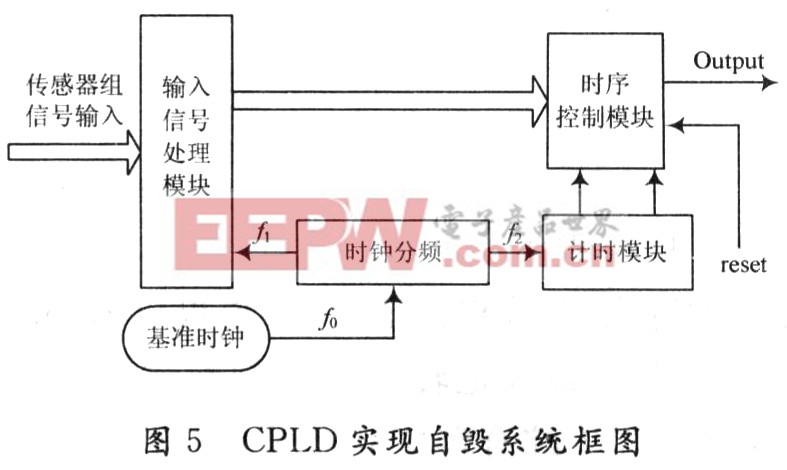
飛行器自毀系統在飛行器起飛后開始工作,并實時監控飛行參數傳感器組及計時模塊產生的控制信號。圖5給出了自毀控制電路的硬件實現方案。在CPLD中實現系統的總體結構如圖5所示。CPLD外圍的高性能運算放大器為主要元件的模擬電路以及傳感器組用來產生時序控制信號(c1,c2,c3,c4,c5),并輸入到輸入信號處理模塊。時鐘分頻用來產生各個模塊工作所需的時鐘。計時模塊用來產生飛行總時間(tmax)。時序控制模塊用來產生自毀輸出信號(Output),它是整個系統的控制核心,它的可靠性和穩定性是飛行器能否實現可靠自毀的基礎。這里采用狀態作為輸出信號且帶有復位信號的Moore型有限狀態機設計時序控制模塊實現飛行器可靠自毀。
3.2 改進型有限狀態機實現時序控制
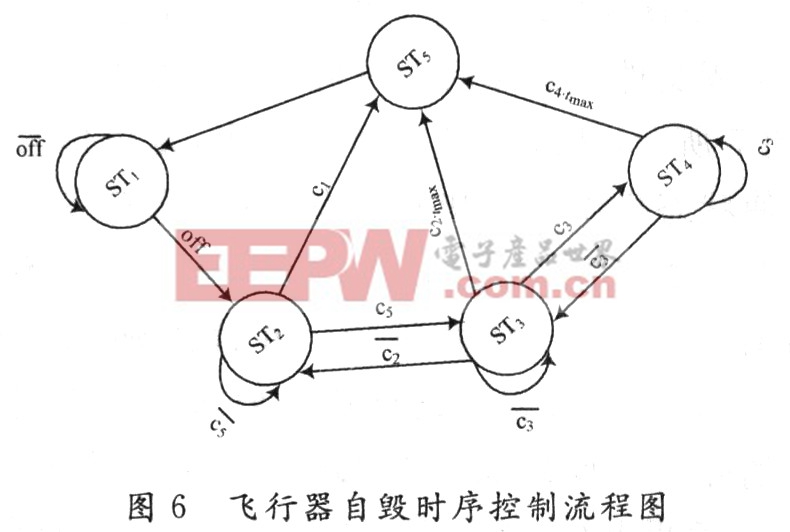
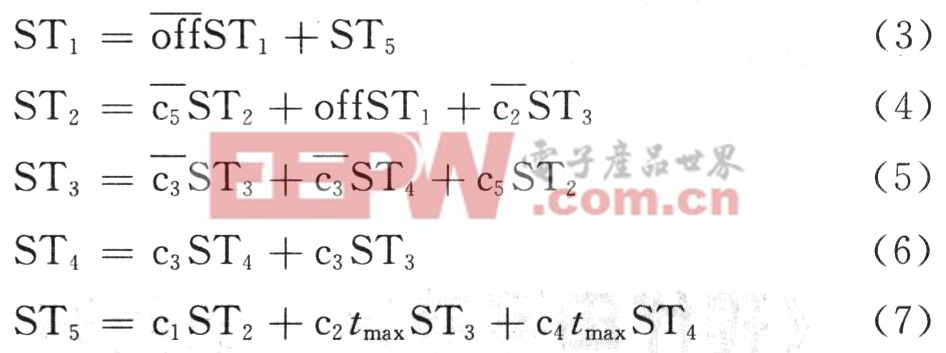
飛行器自毀時序控制流程圖如圖6所示。飛行器自毀系統的時序狀態變化由各個傳感器的輸入及CPLD計時器狀態決定。飛行參數傳感器組輸入不同的狀態指令,時序控制系統就可以在不同的狀態間變化,其中ST5狀態是整個自毀系統的控制輸出。根據圖6可以得到5個狀態觸發器的激勵方程:







評論