基于模糊PID算法的電阻爐溫度控制系統(tǒng)設(shè)計

3.2 模糊自整定PID算法程序
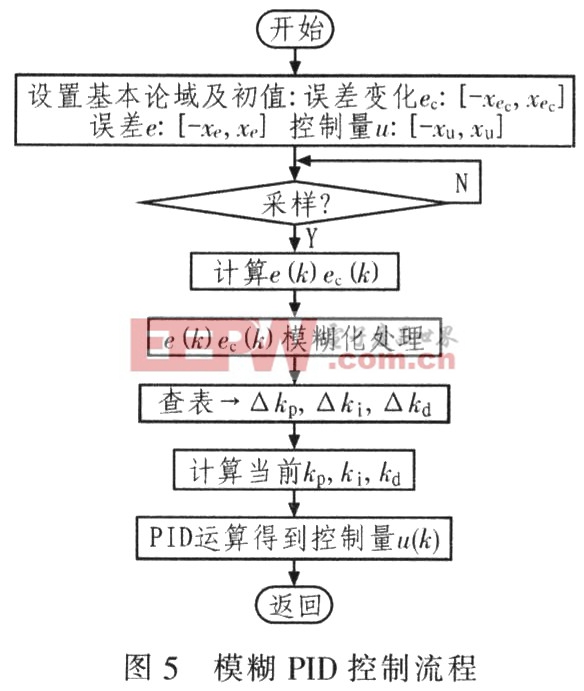
模糊自整定PID算法程序程序的總流程為:首先模糊整定,然后根據(jù)誤差和誤差變化率對PID的3個參數(shù)進行在線調(diào)整,把經(jīng)過模糊調(diào)整后的PID參數(shù)作為最終的控制參數(shù)進行PID控制。溫度誤差e和溫度誤差變化率△e的最壞情況值均取為100℃,在此建立的溫度誤差e和溫度誤差變化率△e的基本論域,數(shù)字量化確定e(k)的論域區(qū)間為[-128,128]。這樣就必須對溫度誤差e和溫度誤差變化率△e超過100°C.變換后的e和△e其動態(tài)范圍限幅壓縮,這樣就可以使溫度誤差和溫度誤差變化率△e在整個測控溫度變化范圍[0℃,1 112°C]內(nèi),控制量都可以起到作用。圖5為模糊PID控制流程。
4 結(jié)語
將系統(tǒng)溫度設(shè)置不同的溫度值,觀測記錄溫度變化曲線。電加熱爐溫度控制系統(tǒng)實際輸出的響應(yīng)曲線如圖6所示。
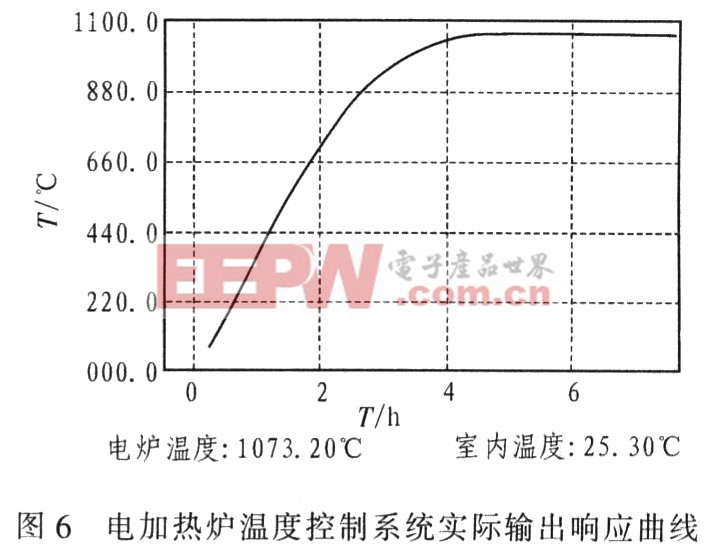
從電加熱爐溫度控制的實際效果來看,F(xiàn)uzzy-PID復(fù)合控制器具有以下特點:①系統(tǒng)具有較好動態(tài)特性。不僅升溫速度快,而且超調(diào)量很小;②系統(tǒng)具有比較理想的穩(wěn)態(tài)品質(zhì),穩(wěn)態(tài)過程沒有振蕩,溫度控制精度在±3℃以內(nèi);③系統(tǒng)的抗干擾能力增強,對生產(chǎn)現(xiàn)場的各種噪聲和干擾具有較好的抑制作用;④當(dāng)被控過程參數(shù)發(fā)生變化時,控制系統(tǒng)仍能保持較好的適應(yīng)能力和魯棒性。

光敏電阻相關(guān)文章:光敏電阻工作原理
pid控制器相關(guān)文章:pid控制器原理





評論