模糊控制在開關磁阻直線電機上的應用

開關磁阻直線電機結合傳統開關磁阻電機和直線電機優勢,電機動子直接與負載相關聯,消除了傳統的機械傳動系統,減少了損耗,降低了成本,同時電機具有起動力矩大,過載能力強,調速范圍廣等優點。相比其他的交流直線電動機,LSRM在高精度加工以及大功率傳輸方面有更廣泛的應用前景。但是LSRM是一個多變量高度耦合、非線性很嚴重的系統,常規控制方法因為參數的變化不能在整個工作范圍內兼顧穩態精度和動態性能要求,難以獲得良好的控制效果。近來發展起來的 Fuzzy控制是一種仿人智能控制法,它不依賴被控對象的數學模型,便于利用人的經驗知識實行控制,這對于一些復雜可變或結構不確定,難以用準確的數學模型描述的系統而言是非常適宜的,具有較強的魯棒性,特別是對于無法確定的復雜對象具有較好的控制性能。本文用Matlab仿真,通過模糊控制和PD控制的比較,證實了模糊控制在大范圍變動時,動態響應快,超調小,且具有良好的魯棒性。為開關磁阻直線電動機的實際應用提供了一種有效的方法。
本文引用地址:http://www.104case.com/article/163662.htm1 LSRM結構
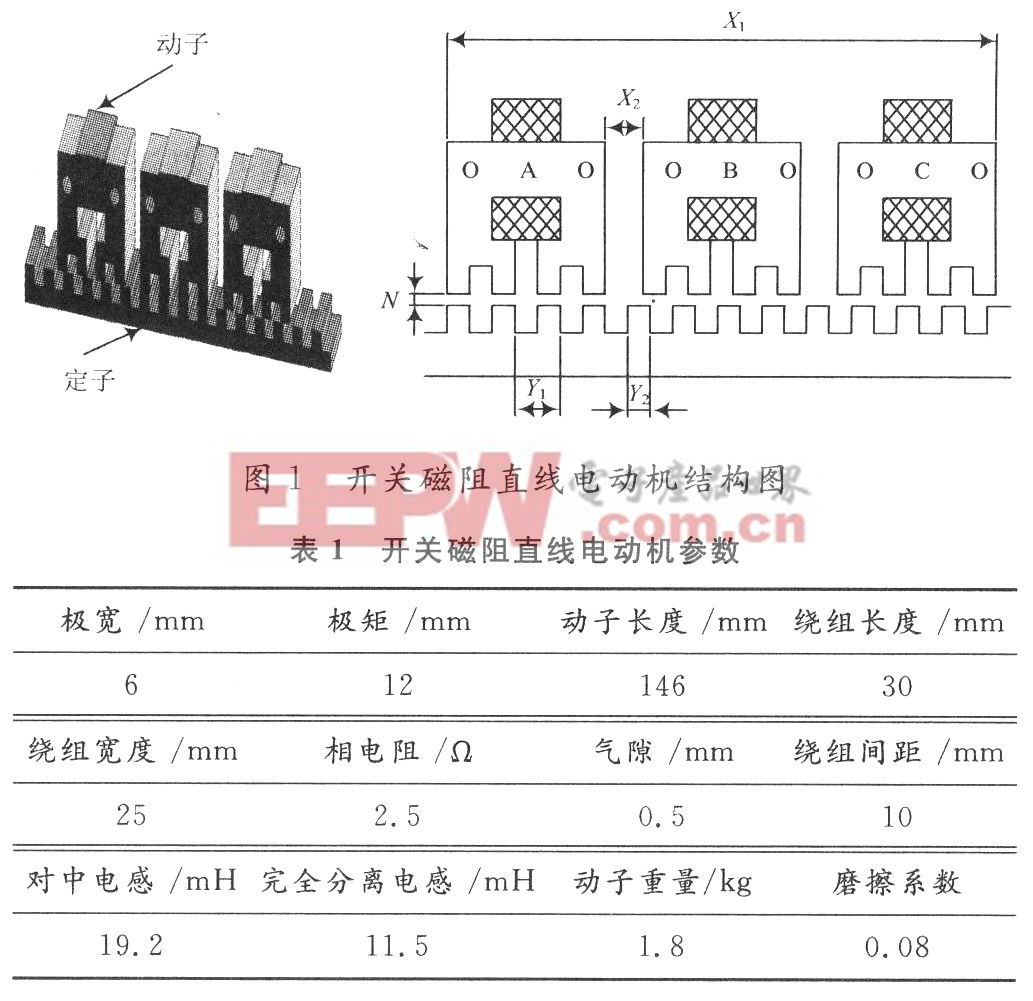
開關磁阻直線電動機的結構如圖1所示,電動機由動子和定子兩部分組成,動子結構件由鋁型材制作,慣性小,磁路隔離效果好,3個相同的繞組安裝在動子上,三相繞組間按互差120°電角度排放;定子導軌由條狀O.5 mm厚的硅鋼片疊成。電動機電氣和機械參數見表1。
2 LSRM數學模型
直線開關磁阻電動機的單相回路電壓平衡方程為:

式中:Uj為j相繞組的電壓;Rj為j相繞組的電阻;ij為j相繞組的電流;ψj為j相繞組的磁鏈。

這里電感Lj是相電流ij和動子相對位移x的函數。
將式(1)代人式(2)中,可得:
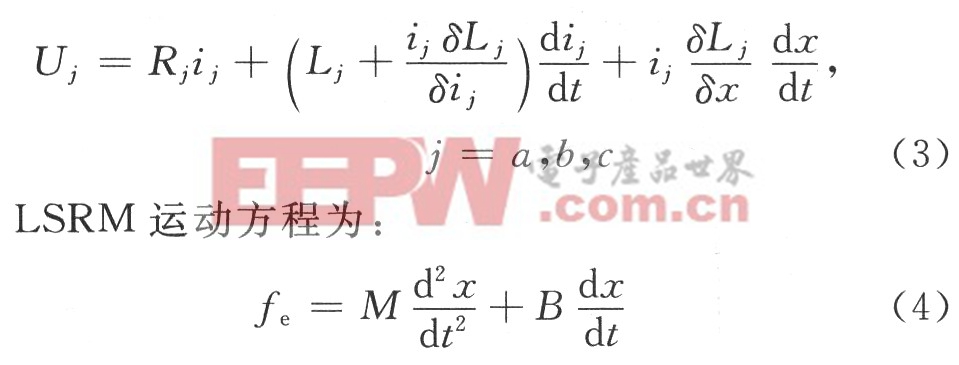
式中:M是電機動子的質量;B是摩擦系數;x是動子位置;fe是電機產生的電動力。
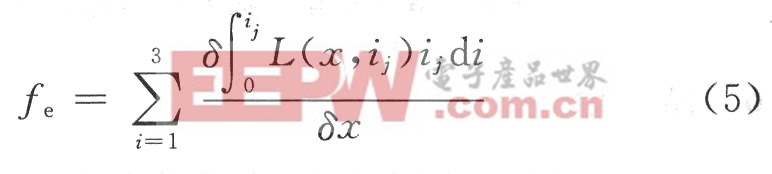
盡管上述LSRM的數學模型從理論上完整、準確地描述了LSRM電動機中的電磁及力學關系,但由于L(x,i)以及i(x)難以解析,使用起來卻很麻煩,往往根據要求和實際情況做簡化。







評論