模糊控制在開關(guān)磁阻直線電機(jī)上的應(yīng)用

3 LSRM線性電感模型
一般在進(jìn)行開關(guān)磁阻電機(jī)控制時對電感模型做線性化處理,在線性模型中做如下假設(shè):
(1)忽略磁通邊緣效應(yīng)和磁路非線性,且磁導(dǎo)率為無窮大,因此繞組電感是動子位置函數(shù)的分段線性函數(shù);
(2)忽略所有功率損耗;
(3)功率管開關(guān)動作瞬間完成;
(4)電機(jī)恒速運(yùn)轉(zhuǎn)。
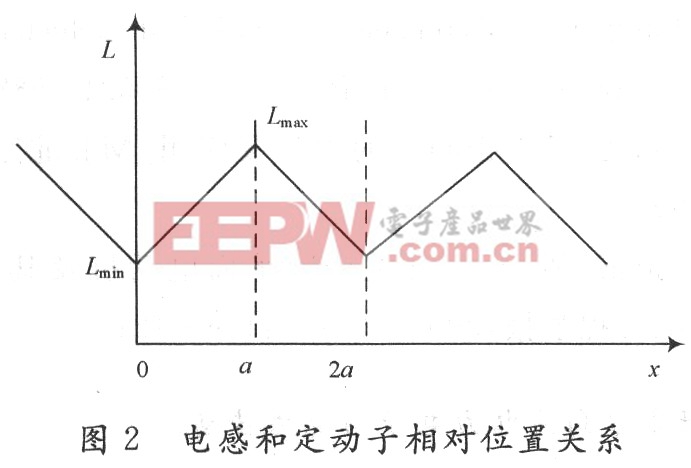
LSRM移動時動子的凸極對應(yīng)定子的凹極時,電感最小,對應(yīng)定子的凸極時,電感最大,電機(jī)在運(yùn)動的過程中,電感會發(fā)生周期性變化,這個周期,稱之為電感周期。本文后面所討論的電流的控制以及瞬時力矩的控制都是在一個電感周期內(nèi)來討論的。電感和定動子相對位置關(guān)系如圖2所示。
| |
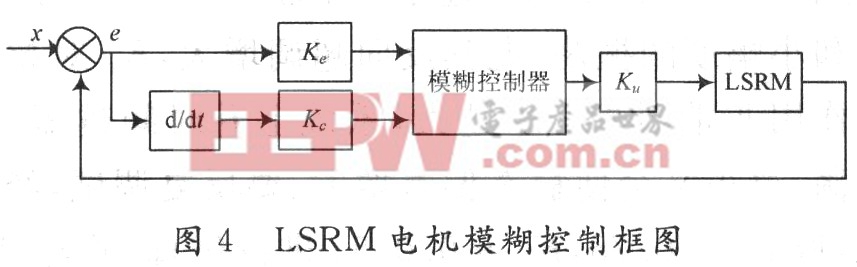
4.2 模糊控制器的設(shè)計(jì)
選取7個常用的語言變量值,即負(fù)大(NB)、負(fù)中(NM)、負(fù)小(NS)、零(ZE)、正小(PS)、正中(PM)和正大(PB)。位移偏差E,位移偏差變化量EC及控制量I的模糊子集均為{NB,NM,NS,ZE,PS,PM,PB}。圖5是它們的隸屬度函數(shù)。
|








評論