雙臂單腿跳躍機器人的實時控制技術(shù)研究

 |
3 實驗驗證
在雙臂單腿跳躍起機器人研究的前期,因為理論和技術(shù)水平的限制,尚不能馬上進入聯(lián)機調(diào)試階段。但可以設(shè)計實驗先對控制系統(tǒng)的實時性能作出驗證。
實驗中:
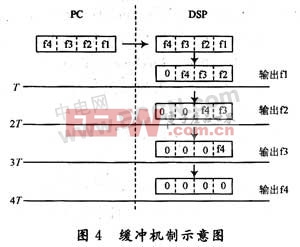
控制周期為5 ms;緩沖區(qū)大小為4(即一次發(fā)送四個控制量);實驗中所用到的一次矩陣運算,指對某10維方陣的求逆并乘于另一方陣,系調(diào)用Matcom C++矩陣庫實現(xiàn)。一次運算時間約0.1 ms。矩陣運算的作用是模擬實際控制中進行的運算量。實驗數(shù)據(jù)的采樣頻率為200 Hz,數(shù)據(jù)值為信號電壓大小,單位為V。
3.1 實驗設(shè)計
構(gòu)造一個由輸入控制輸出的系統(tǒng),即輸出跟隨輸人的動作,這類似于生物的反射回路,雖然算法簡單,但很能說明實時問題。實時性不好,輸出就不能很好隨動,對于生物就是反應(yīng)遲鈍。所以即使從直觀上,這個實驗也能反應(yīng)出系統(tǒng)的實時性好壞。
上位機中插入上百次的矩陣運算用以模擬實際中復(fù)雜算法的時耗,從而實驗中顯示的實時性性能同樣也可以說明實際可用的實時性。
實驗框圖如圖5所示。
 |
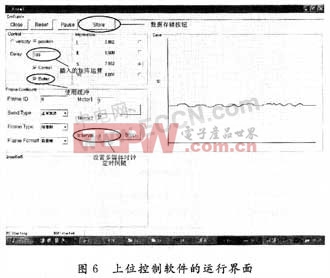
控制軟件的運行界面如圖6所示。
 |
3.2 實驗結(jié)果
實驗中,A/D采得的輸入信號經(jīng)CAN通信送給PC,PC由此來計算控制量(隨動控制中,輸入/輸出只是簡單的比例關(guān)系)再經(jīng)CAN發(fā)送給DSP,最后由DA輸出給電機。
實驗最終要得到輸入與輸出曲線,看輸出能否很好地跟隨輸入。具體操作上,DSP在把控制量送給D/A的同時,也回送給PC,所以輸入和輸出數(shù)據(jù)都可由PC采集(即圖中數(shù)據(jù)存儲按鈕對應(yīng)的功能)。再借助Matlab的曲線繪制功能來對實驗結(jié)果進行分析。
為顯示系統(tǒng)在高負荷運算下的實時性,以下實驗均在插入100次矩陣運算(時耗約為10 ms)的情況下進行。
(1)對位置的跟蹤
輸出等于輸入,如圖7所示,可以看到他們幾乎重合。幾處不吻合的地方是因預(yù)估造成的,也說明那一刻PC并未順利將控制量發(fā)送給DSP(100次矩陣運算造成的),DSP靠讀取其緩沖區(qū)中的估計控制量工作,但并不影響整體的控制效果。
如果不啟用緩沖,PC一次只發(fā)送1個控制量,將得到如圖8所示結(jié)果。
 |
因為DSP默認的輸出是零,控制量的不及時到位,造成’DSP在大部分時間都輸出零。這個輸出加在電機上,根本無法控制電機隨動。
這就是為仆么在前面說緩沖對提高實時性效果最顯著,他彌補上位機非實時的弱點,從而增加了系統(tǒng)的實時性。
(2)對速度的跟蹤
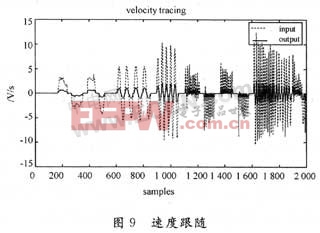
為了更直觀地顯示系統(tǒng)響應(yīng)的快慢,可以讓電機來跟蹤位移傳感器的速度信號。位移傳感器不動時電機不轉(zhuǎn),正向動正轉(zhuǎn),反向動反轉(zhuǎn)。
如圖9所示,為了保護電機,輸出值是輸入的1/5。可以看到,輸出對不同頻率變化的輸入都很好地隨動。說明系統(tǒng)回路具備了較好的實時性。
 |
4 結(jié) 語
通過對上下位機模式控制系統(tǒng)的深入分析,發(fā)現(xiàn),在控制同路中,對上位機的要求不是精確定時,而足及時響應(yīng),這恰使得在 Wndows平臺下開發(fā)上位機控制軟件成為可能。由此,本文提出一種“DSP定時PC從動”實時控制方式,并引入了緩沖機制等提高實時性的關(guān)鍵技術(shù),保證實際應(yīng)用中控制系統(tǒng)具有較穩(wěn)健的實時性能。
本文所設(shè)計實驗,已經(jīng)考慮較苛刻的時間及環(huán)境閃素,能說明整個系統(tǒng)具有良好的實時性。該實時控制方案的可行,有效降低了雙臂單腿跳躍機器人控制系統(tǒng)的開發(fā)難度和成本,是關(guān)鍵的階段性成果。











評論