基于CAN總線的四路舵機控制器的研究

由于舵機系統對定位精度、頻率響應特性、階躍響應特性和震蕩次數等因素有著非常高的要求,因此其測試數據、分析曲線和指示結果是分析、判定系統性能和工作狀態的重要依據和手段。本文所涉及的控制器具有CAN2.0總線接口,它負責與PC機通信,這使得控制器在運行中產生的各種參數和變量能夠實時地傳送并在CRT上顯示,極大地方便了參數變化趨勢觀察和控制過程的判斷分析,為加快參數的整定奠定了基礎。
本文引用地址:http://www.104case.com/article/163552.htm1.系統的構成與工作原理
1.1 系統的構成
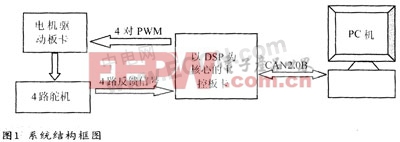
如圖1所示,該系統由主控板卡、電機驅動板卡、微型計算機、CAN總線通信卡,以及四路舵機組成。其中CAN總線通信卡外購自研華公司,插入微型計算機的ISA插槽中,安裝驅動程序后便可以在該公司提供的DLL動態鏈接庫的基礎上進行開發,編寫上位機應用程序。主控板卡中的運算處理器采用DSP處理器TMS320F2812。
 |
1.2 系統的工作原理
本系統由上位微機通過外購的CAN總線通信卡發送控制指令,經由CAN2.0A總線傳送至主控板卡。主控板卡將采集到的舵機實時位置數據,與上位機傳來的位置指令數據,代入到組合式控制算法中進行運算。處理后得到的PWM調制波形作為電機驅動板卡的輸入信號,通過電機驅動板卡上的H橋電路對電機進行驅動,進而完成對電機的控制。另外,主控板卡還將舵機運行狀態數據經由CAN2.0A總線上行傳送至上位微機,由PC機測控應用程序對其進行后期分析處理。
2.系統的硬件電路描述
2.1 主控板卡部分
2.1.1 主控板卡的構成
在整個硬件系統中,主控板是核心的部分。該板卡的原理框圖如圖2所示。此板卡的主控芯片DSPTMS320F2812,其內部嵌有CAN總線控制器,用戶可通過CAN總線與計算機進行高速實時通信。我們采用飛利浦公司的82C250作為CAN總線控制器相配合使用的CAN總線收發器,完成總線的傳輸電平轉換。采用ADI公司電壓基準源REF192給DSP內部的模數轉換器提供標準比較電壓。在舵機電位器產生的表征角度值的反饋電壓信號送至DSP處理器的ADC模塊以前,為了使主控板卡的輸入阻抗趨近于無窮大,加入了一組以BB公司的精密儀表運放INA114為核心的射極跟隨器。
2.1.2 主控板卡的功能
主控板卡不但承擔著執行來自上位機的控制指令并將指令執行的實時狀態上行送至上位機的任務,而且還要將經過DSP內部組合式控制算法的運算產生的相應占空比的PWM信號送至電機驅動板卡,實現對4路電機的精準控制。
板卡中各部分的具體職能如下:
a.三態緩沖器件LVT245一方面加大PWM信號的驅動電流,提高其驅動能力;另一方面可以保護DSP芯片免受功率驅動板卡的沖擊損害。
b.DSP處理器TMS320F2812主要有4項功能,分別是:
(1)eCAN控制器按約定的通信脅議利用CAN2.0A總線與上位計算機進行通信。
(2)模數轉換控制器以12位精度、1兆赫茲的采樣頻率將舵機電位器送來的反饋模擬信號進行數字化轉換,并將其送入到CPU中進行相應的算數濾波處理。
(3)中央處理單元(CPU)將傳來的目標值同濾波過的實時角度反饋數據一起代入到組合式算法中運算,生成14位占空比數值。
(4)PWM事件管理器接收由CPU運算產生的占空比數值,以此為依據生成16K赫茲頻率、14位細分精度的PWM信號。
c.CAN總線收發器82C250芯片將DSP內部eCAX控制器的邏輯電平轉換為總線上的差動電平,通過CAN通信卡與上位機進行通信。該芯片具有較好的電磁兼容性,可以適用于電磁環境復雜的彈內腔體。
d.舵機反饋的舵偏角信號為0~6v,而F2812的前向模擬輸入通道的轉換電壓范圍為3V,因此本文以4片INA114為核心的前端調理模塊將反饋回來的4路模擬信號進行分壓,將其轉換到適合DSP內部ADC模塊工作的電壓范圍;另外,該調理模塊形同一組射極跟隨器,令輸出阻抗接近于無窮小,輸入阻抗接近于無窮大,在一定程度上減小了反饋電壓的失真。

pid控制器相關文章:pid控制器原理









評論