帶Smith預估器的預測PID控制器的設計

由上述各式,根據傳統的GPC算法,令J對△U1的偏導數為0,可以得到一個控制量序列[6,9],為簡化計算,Diophantine方程一般用遞推算法求解,但仍然不能避免矩陣求逆,計算量大,且不能保證矩陣可逆,計算中還會出現數值病態問題,在實際應用中存在著較大的安全隱患。
為避免傳統GPC中的矩陣求逆問題,在算法中引入階梯式策略[6]。令本文引用地址:http://www.104case.com/article/163514.htm
由Diophantine方程可知F(1)=Q,因此式(13)亦可表示為式(5)的形式,此時
1.3 整定結果
由式(4)與式(14)的對應關系,我們可以比較得到PID控制器各參數(其中Ts為采樣周期)如下:

2 整定算法的分析
2.1 參數調節的問題
本文通過引入階梯因子,避免了參數整定過程中矩陣求逆,大大簡化了計算。同時,在實際系統中,由于執行機構性能的限制,若控制量變化頻率高,不僅執行機構動作跟不上,起不到作用,而且會增加執行機構的磨損。而階梯式策略假定控制增量服從一個等比序列,這相當于給控制增量加了一個較強的限制。另外,由于引進階梯因子后,加權因子λ性能的影響減小,而且其對于控制量的抵制作用也變得比較復雜,因此我們主要可以通過β來調節對應PID控制器的魯棒性與快速性。
2.2 整定誤差的Smith補償
在前述的算法推導中,可以發現,為了建立I-PD與SGPC之間的相互聯系,對多項式X(z-1)進行了靜態處理,由式(12)與 式(13)可以看出,這樣的處理,相當于認為過去k+nb-1步的輸入變化量都相等,且等于當前時刻的輸入變化量,即△ut-knb+1=△ut-k-nb+2=…=△ut,而實際運行中,在系統動態響應階段,這種關系顯然總是不成立的。這種近似處理,在系統無延時或小延時,即k取值很小時,影響可以忽略,但隨著時延步數的加大,這種處理對系統魯棒性地影響必將逐漸加劇,所以需要對具有大延時的系統進行補償。因此,本文在系統中引入Smith預估器,以消除系統的時延影響,改善大延時系統的控制效果。
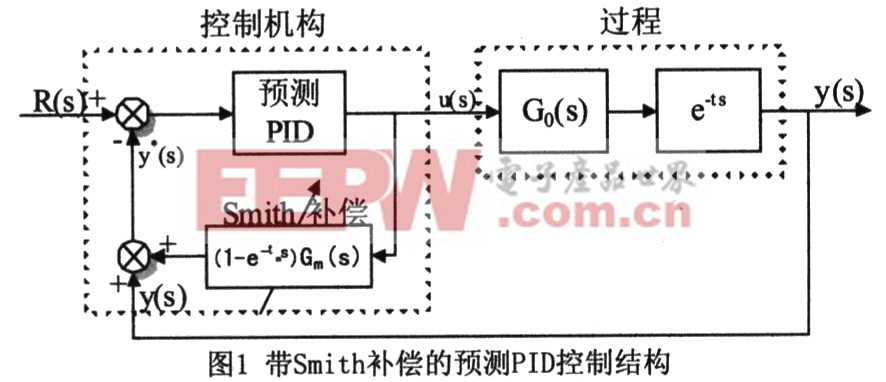
由于常規Smith預估器在模型失配時存在低魯棒性問題,因此在應用中可采用文獻[8]中的自適應方案,即首先通過單變量尋優方法估計實際過程的純滯后,然后再用帶遺忘因子的最小二乘法辨識過程模型的其他參數,以在線修正模型。這樣系統的控制結構可以設計成圖1所示的形式。從圖中可以看出,若系統無延時,系統等同于簡單的預測PID控制回路,而當系統有時延時,延時對系統的影響即可由smith預估器消除,而預測PID參數則僅需根據無時延模型Gm(s)來整定,這樣就可以避免時延帶來的參數整定誤差。
3 仿真及分析
為仿真需要,考慮以下單變量模型:
P=10,m=5,λ=1,B與k的值按仿真需要選取。
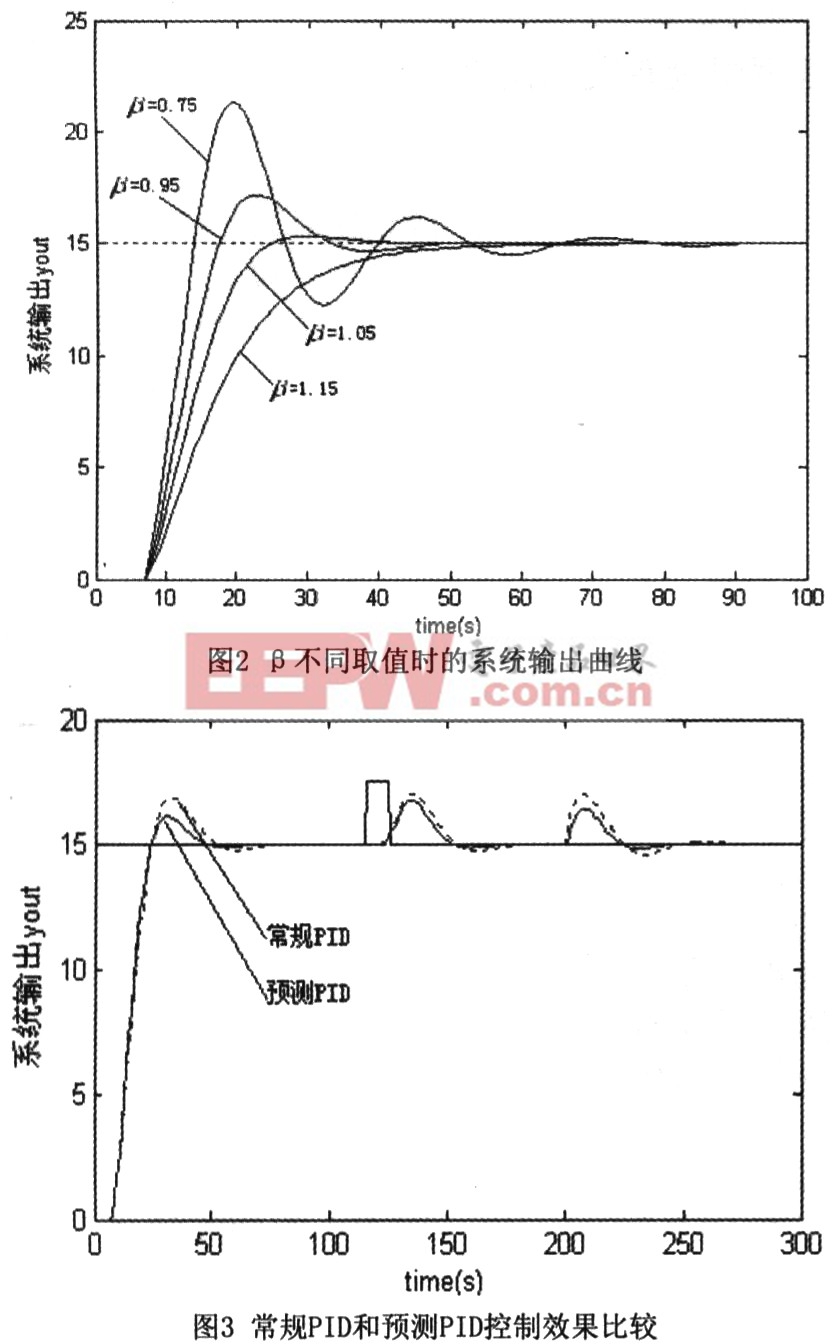
圖2所示為K=7,β分別取0.75、0.95、1.05與1.15時,PID控制系統(無Smith補償)的響應輸出曲線,從圖中可見,基于SGPC整定的PID控制器的動態性能可以很容易地通過選擇不同的B值來調節,以獲取合適的控制器參數,隨著B取值的增加,系統的超調越小,響應速度則越慢,充分保持了SGPC控制的這一特點。

pid控制器相關文章:pid控制器原理








評論