基于S3C44B0X的移動機器人的應用研究

4 實驗結果
實驗是在室內進行的,場地面積12m×12m,綠色毛毯狀物質貼于場地表層以防止打滑。路徑規劃采用基于柵格的導航算法²,機器人形狀大小0.8m×0.8m×0.6m, 柵格尺度為機器人尺度為0.8m×0.8m,柵格的行數與列數均為15,柵格總數為15×15=225格。以積木和其它機器人為靜止障礙物。移動機器人的運行軌跡如圖4所示。圖中淺灰色方框為障礙物,深灰色方框路線為機器人運動軌跡,起始點與目標點如下圖4所標。實驗結果表明,該機器人能夠避開障礙物到達目標點,實驗多次,位置誤差在0~0.4m,具有可行性。
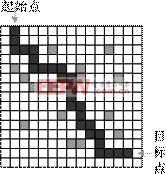
圖4 機器人運動示意圖
5 結論
本文作者的創新點是采用高性能ARM芯片S3C44B0X為主控制和單片機SPCE061A為輔助控制器相結合的方法對機器人進行控制,并引入嵌入式實時操作系統µC/OS-II完成機器人導航算法的實現以及對機器人多個任務進行合理規劃和調度,以及保證機器人對未知環境的快速響應和保證整個系統的精度,實驗證明了這種方法具有可行性。
該控制系統有豐富的硬件資源,傳感器所獲取的信息的處理也采用高性能單片機SPCE061A,為以后視覺傳感器(CCD)的使用提供了硬件基礎,該機器人占用主控制器的硬件也比較少,為以后系統的升級提供方便。也可以采用更先進的導航算法使 更加智能化。










評論