基于S3C44B0X的移動機器人的應用研究

2.2 全局定位模塊
機器人當前位置的確定至關重要,為機器人路徑規劃提供必不可少的信息,目前定位傳感器有全球定位系統(GPS),旋轉電位計,光電編碼器,磁羅盤,電子羅盤,加速度計等。針對使用環境,本模塊采用長春第一光學有限公司生產的光電編碼器和電子羅盤相結合的方法來確定機器人的當前的坐標點¹。光電編碼器經光電轉換,將軸的角度位移轉換成電脈沖信號,6通過放大電路輸出到S3C44B0X的計數器T1,把在特定時間采集的脈沖進行存儲,脈沖信號與輪子的轉過的圈數成正比,因而可以計算在設定機器人的實際路程。電子羅盤采用霍尼維爾低成本的HMR3100平面電子羅盤,內部有HMC1022二軸磁傳感器,,角度測量精度可達5度,電子羅盤可以確定機器人相對北極的絕對方向,可以精確測出機器人的運動方向與理論方向之間的偏差,從而糾正機器人運動軌跡。
2.3 程序下載模塊和電機驅動模塊
程序下載模塊主要完成啟動程序和應用程序的下載,本系統提供兩種下載方式,串口下載和并口下載。串口下載通過RS232串口線連接板上COM1與PC進行通訊,并口下載通過并口線與JTAG調試接口連接完成PC與S3C44B0的通訊。
電機驅動模塊的精度對整個系統精度的影響很大,考慮各種因素本模塊選用一種基于雙通道、高壓、高速柵極驅動方式的集成驅動器IR2110。IR2110驅動芯片能將輸入的邏輯信號轉化成同相位的低阻抗輸出驅動信號,可驅動同一橋臂上的 2路輸出,驅動能力強,響應速度快,工作電壓高,成本低等特點提高了系統的精度和可靠性。電機采用普通大功率直流減速電機,使用大功率H橋驅動電路,電路原理如圖3所示。
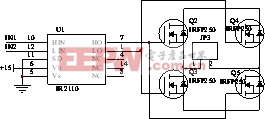
圖3電路驅動原理圖
電路中IR2110作為前置驅動,四個IRFP250組成H橋驅動電路。當IN1端加上PWM信號,IN2端加上低電平時Q2,Q5導通,Q3,Q4截止,驅動電機正轉;當IN2端加上PWM信號,IN1端加上低電平時Q3,Q4導通,Q2,Q5截止,驅動電機反轉。調節PWM脈沖寬度可以調節電機轉速。為了使電機運行平穩,PWM信號的頻率不低于1KHZ。
3 系統軟件實現
軟件部分的實現是基于移植到S3C44B0X的實時多任務操作系統µC/OS-II,它是基于優先級,搶占式實時內核,具有源代碼公開,可移植性好,可剪裁,多任務等特點,可以管理64個任務,應用程序可達56個任務。它主要完成任務管理,時間管理,信號量管理,內存管理等功能。
該機器人主要完成避障檢測與信息傳輸,位置獲取,路徑規劃,運行控制功能,因此,該系統共創建了4個任務,任務1:避障檢測與信息傳輸,任務2:位置獲取,任務3:路徑規劃,任務4:電機驅動控制。任務的優先級依次降低,任務之間通過油箱傳遞信息。移動機器人在完成初始化系統后,驅動電機執行任務4按照預定的路徑向目標點前進,同時單片機SPCE061A控制的傳感器工作,當傳感器探測周圍有障礙物時,任務1進入就緒態,由于任務1的優先級高,就搶占CPU的使用權,完成障礙信息的處理與傳輸。通過信號量的傳遞,任務2進入就緒態,完成目前位置的計算,為路徑規劃提供依據。任務3根據任務1提供的障礙信息和任務2提供的信息位置信息啟動導航算法進行路徑規劃,新的路徑規劃完成之后,任務4進入運行狀態,從而完成最終規定任務。










評論