基于模糊控制的機器人尋線控制系統改進設計

(4)模糊合成通過上一步模糊推理,每條模糊規則都得到一個模糊結論,模糊合成是對模糊結論的綜合處理,最后得出總的結論。
(5)反模糊化通過各種反模糊化算法,將模糊推理融合的結果即模糊集隸屬函數轉化為一個精確值。
機器人的自主尋線行走是利用尋線傳感器檢測機器人偏離導引線的位置,即利用機器人的姿態偏差值調整左右驅動電機的行進速度,從而調整尋線機器人的運行軌跡,使其沿著導引線運行。此特點恰好符合模糊控制的思想,所以機器人尋線系統控制器可以采用模糊控制器。
本模糊控制系統有兩個輸入變量,分別是前后尋線傳感器模塊檢測到的引導線信息,即iF,iB。模糊控制系統輸出為左右驅動電機的速度差,即通過調整兩個驅動電機的速度差來調整機器人在導引線上的轉角。
根據尋線傳感器的配置方式,對前后尋線傳感器每一路進行編號,并按照尋線傳感器檢測到機器人相對導引線的姿態偏差,將傳感器的輸出轉換為16進制的偏差輸出值,傳感器編號如表1所示。本文引用地址:http://www.104case.com/article/163433.htm

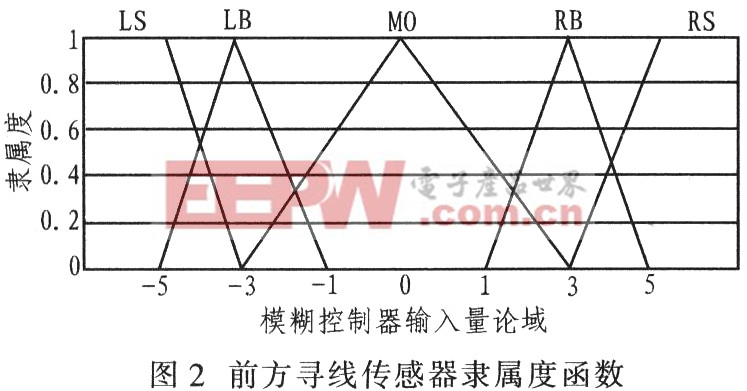
模糊控制器的輸入量的語言值模糊子集確定為{LB,LS,MD,RS,RB}。其中:LB=左大;LS=左小;MD=中心;RS=有小;RB=右大。設定模糊控制器輸入量論域為{一5,一3,一1,O,1,3,5},定義前方傳感器模塊(iF)的隸屬度函數如圖2所示(iB隸屬度函數與iF相同)。為計算簡單,本研究采用線性函數,從而減少控制器的計算負擔,提高數據處理速度。
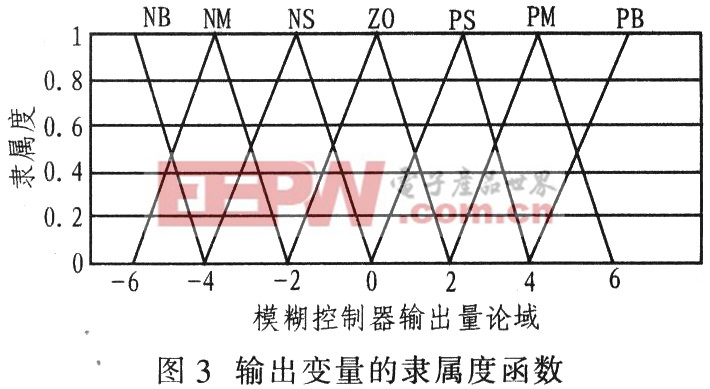
輸出量語言值模糊子集選取為:{NB,NM,NS,ZO,PS,PM,PB}。其中:NB=負大;NM=負中;NS=負小;Z0=零;PS=正小;PM=正中;PB=正大。設定模糊控制器的輸入量論域為[一6,一4,一2,0,2,4,6],定義輸出變量(OUT)的隸屬度函數(圖3)。












評論