自平衡機器人的控制系統(tǒng)設(shè)計

3.4 速度PID控制算法
機器人采用經(jīng)典的PID算法進行平衡控制。控制系統(tǒng)采用典型的雙閉環(huán)控制結(jié)構(gòu)和前饋控制方法。速度環(huán)路設(shè)計有利于提高電機輸出速度精度。前饋控制主要是為了補償電機轉(zhuǎn)軸與車輪轉(zhuǎn)動軸以及傳動系統(tǒng)的間隙誤差,這些誤差是穩(wěn)定的、可以測量的。當(dāng)電機在正反轉(zhuǎn)變換時,控制系統(tǒng)可以檢測到變換方向,經(jīng)過位置誤差環(huán)節(jié)調(diào)整后把確定的偏差補償量疊加到驅(qū)動器輸出端。這樣電機轉(zhuǎn)動的角度在原理基礎(chǔ)上增加了補償量,機械誤差得以修正。
采用PID控制算法公式如下:
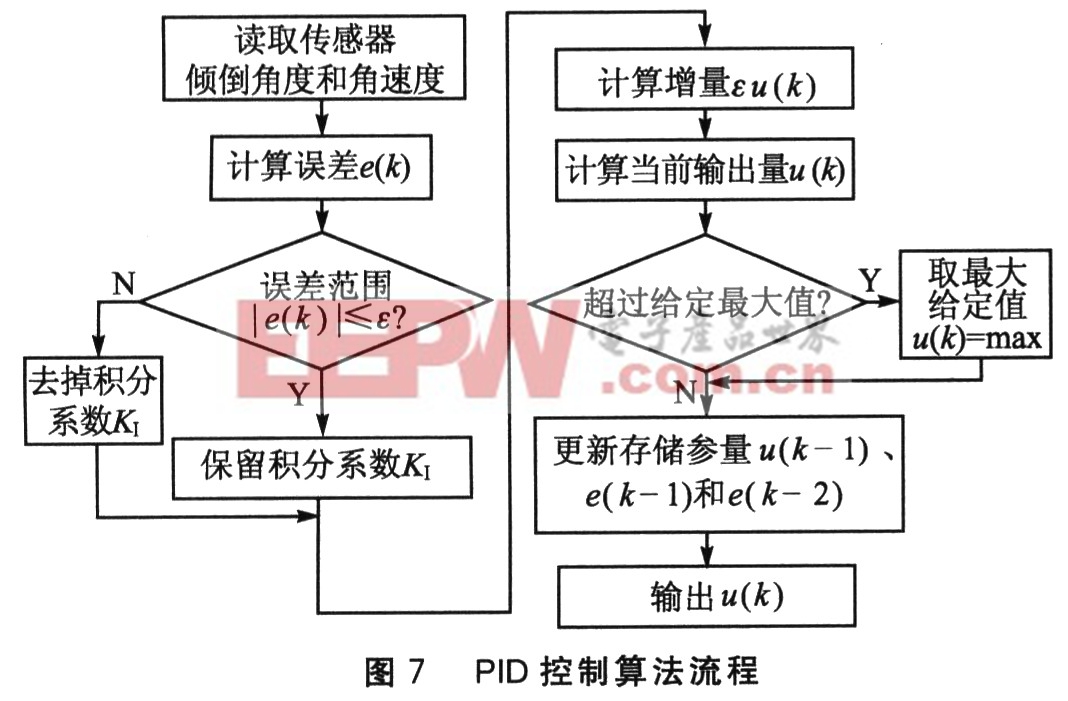
其中,u(k)為當(dāng)前調(diào)節(jié)器輸出量;u(k-1)為上一次調(diào)節(jié)器輸出量;△u(k)為當(dāng)前控制增量;e(k)為當(dāng)前控制誤差量;Kp為比例系數(shù);KI為積分系數(shù);Kd為微分系數(shù)。PID控制算法流程如圖7所示。圖中,ε為調(diào)試過程中設(shè)定的誤差值。
4 實 驗
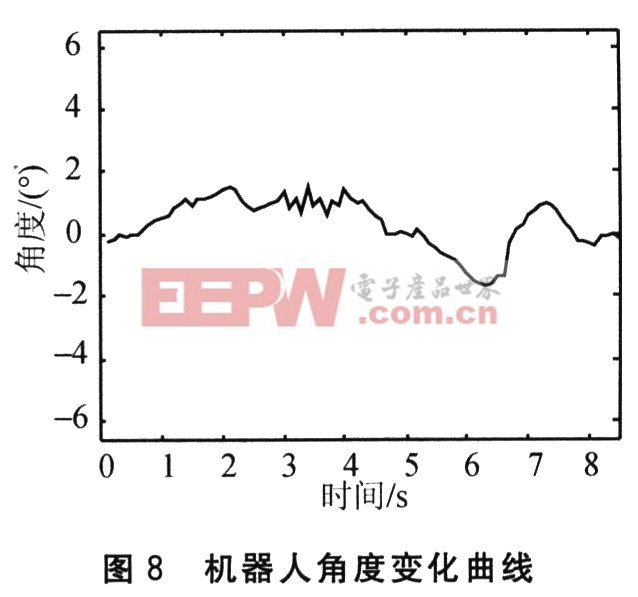
利用該控制方法,對原理樣機進行了多次實驗。實驗中,在機器人正上方水平位置安裝陀螺儀,以采集機器人的傾倒角度數(shù)據(jù)。實際測量角度信息隨時間變化的曲線如圖8所示。通過測得數(shù)據(jù)分析可以看到,機器人大致可以穩(wěn)定在0°附近,最大偏差為±2°。
結(jié) 語
本文設(shè)計了以ATmage128單片機為控制核心,采用紅外測距傳感器監(jiān)控的雙輪自平衡機器人,并搭建實驗平臺進行了控制試驗。實驗結(jié)果表明,該機器人可以通過有效的控制保持在豎直狀態(tài),并且在一定的角度范圍內(nèi)達(dá)到平衡。

伺服電機相關(guān)文章:伺服電機工作原理












評論