自平衡機器人的控制系統(tǒng)設(shè)計

2 姿態(tài)信息獲取
機器人的姿態(tài)信息包括傾倒的角度和角速度。如圖3所示,機器人左右兩側(cè)水平位置各安裝有1個紅外測距傳感器,可以測量與地面之間的距離d1和d2。當(dāng)機器人在豎直狀態(tài)時,左右傳感器距離差為零。當(dāng)機器人傾倒時,距離差與傾倒角度θ成函數(shù)關(guān)系如下:
sin θ=(d2-d1)/D
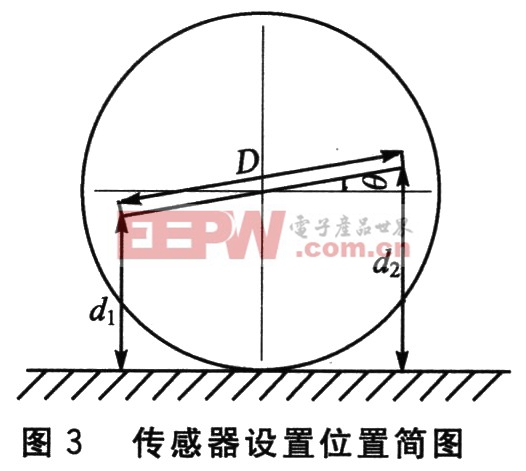
其中,D為傳感器之間的距離。機器人在豎直動態(tài)控制時傾倒角度范圍較小,此時sinθ≈θ,即可由傳感器的距離信息得到機器人的傾倒角度。角速度可以通過θ對時間求導(dǎo)獲得。
選用的紅外測距傳感器為Sharp公司的GP2D12,輸出為0.4~2.4 V的模擬信號,對應(yīng)的測量距離為10~80 cm。在同一溫度下,傳感器的輸出與測量結(jié)果呈良好的線性關(guān)系,可以滿足自平衡機器人的要求。
3 控制系統(tǒng)設(shè)計
3.1 機器人平衡控制原理
當(dāng)車體偏離平衡位置(豎直位置)向前傾斜時,傳感器采集信息并傳送到單片機進行計算和判斷,車輪隨之作出響應(yīng)向前運動,將車體向平衡位置調(diào)整;同樣當(dāng)車體向后傾斜時,車輪將向后運動。這樣機器人一直處在傾斜判斷、運動調(diào)整的動態(tài)過程中,使車體始終保持在平衡位置附近,達到一種動態(tài)平衡。
3.2 控制系統(tǒng)硬件設(shè)計
控制系統(tǒng)主芯片選用Atmel公司基于RISC結(jié)構(gòu)的8位單片機ATmega128。它采用低功耗CMOS工藝;具有豐富的片上資源,包括4個定時器、4 KB的數(shù)據(jù)SRAM、128 KB的程序Flash、可外擴至64 KB的E2PROM和8個10位ADC通道;擁有UART、SPI、I2C、JTAG接口,方便外部擴展和傳感器的接入。
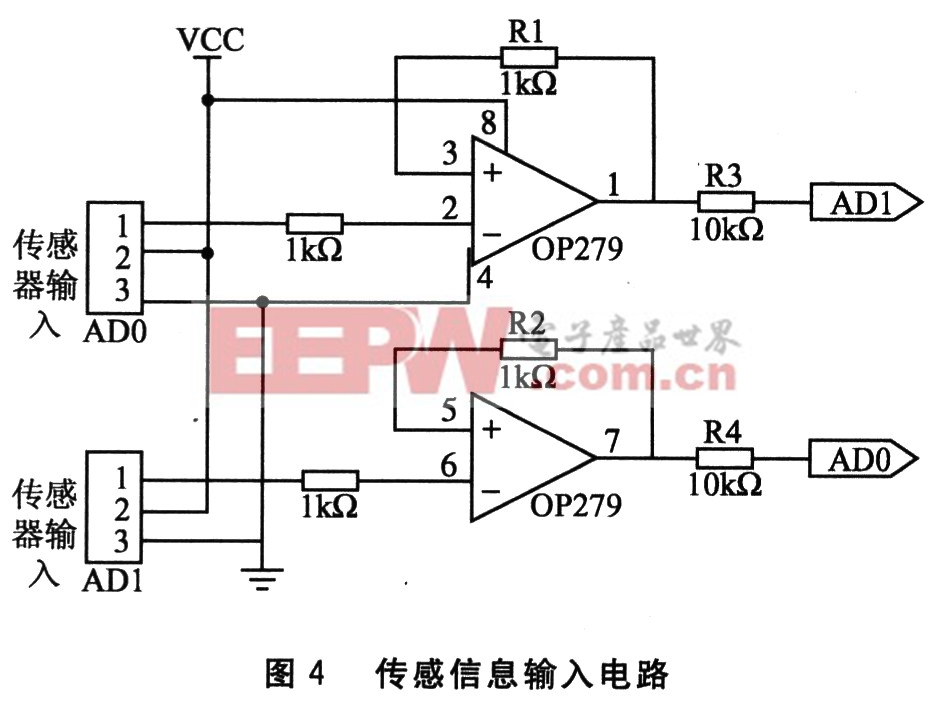
3.2.1 傳感信息輸入電路
傳感器信號通過放大器引入,通過設(shè)置反饋電阻(R1和R2)和輸出端電阻(R3和R4)的阻值可以使輸入的電壓值在要求的范圍內(nèi)。具體硬件電路如圖4所示。

伺服電機相關(guān)文章:伺服電機工作原理












評論