自平衡機器人的控制系統設計

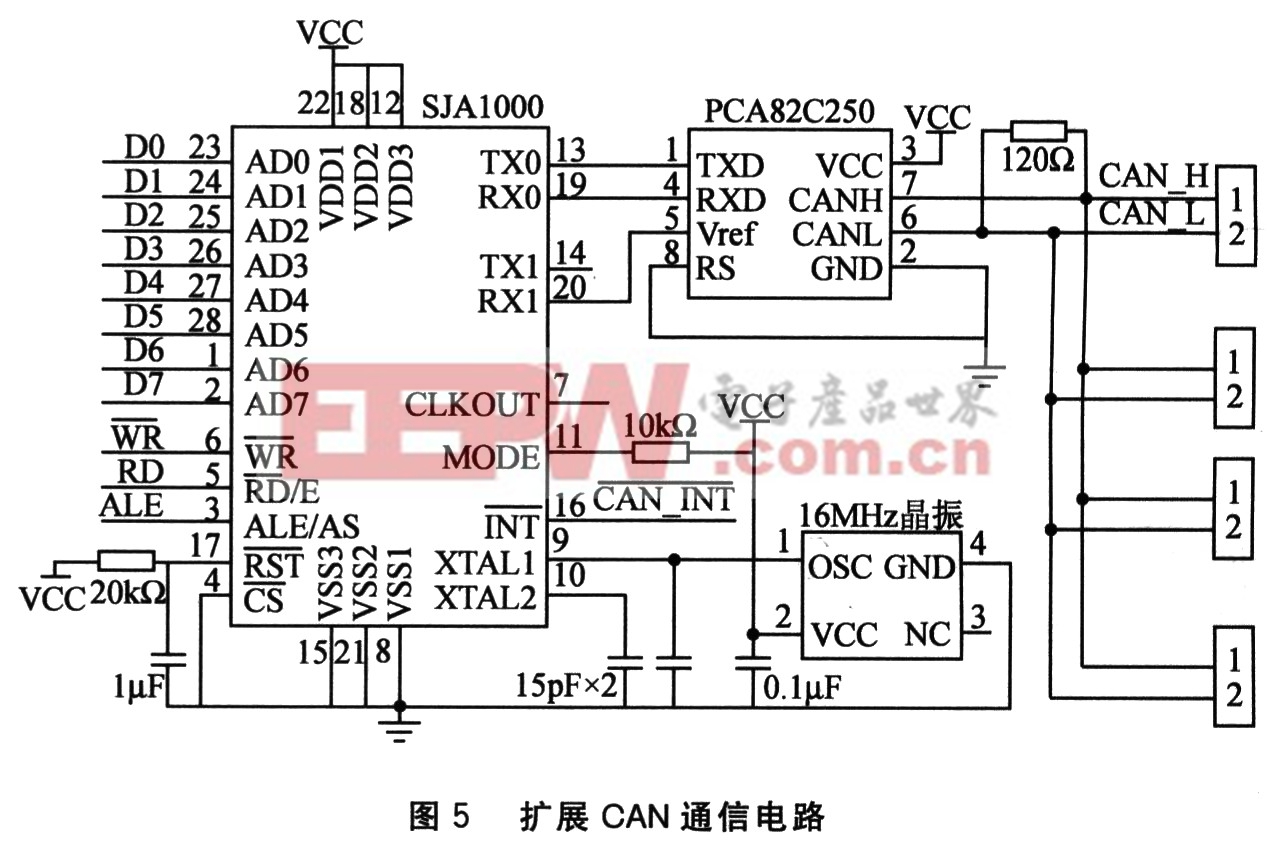
3.2.2 擴展CAN通信電路
單片機與電機控制器采用CAN總線通信,CAN接口采用Philips公司的CAN物理層和鏈路層接口芯片SJA1000和PCA82C250。單片機直接控制SJA1000的AD0~AD7、ALE、INT引腳。SJA1000工作在Intel模式下,MODE腳接高電平,片選腳CS接地,始終處于選通狀態。擴展CAN通信電路如圖5所示。單片機對SJA1000的操作主要是對寄存器的操作:一方面,對SJA1000的模式寄存器、命令寄存器、狀態寄存器、中斷寄存器、中斷允許寄存器、總線定時寄存器、輸出控制寄存器、時鐘分頻計數器進行設置和檢測;另一方面,對收發緩沖區進行讀寫,從而和CAN設備交換數據。
3.3 控制系統軟件設計
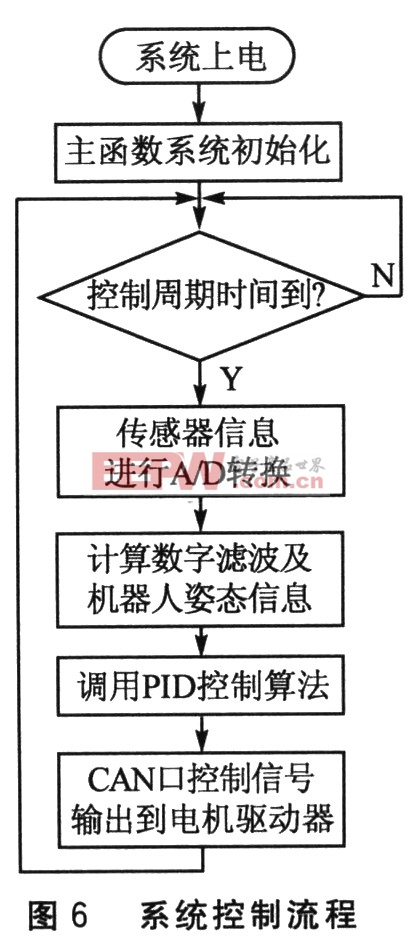
自平衡機器人的控制系統需要實現以下功能:傳感器信息處理和機器人姿態信息計算,電機控制PID算法實現和CAN口的數據處理。系統控制流程如圖6所示。系統上電后從主函數開始執行。主函數負責初始化控制器的I/O口、CAN口、控制周期定時器、A/D轉換器、各個中斷接收數據和發送數據模塊等。初始化完畢,控制周期定時器時間到后,傳感器信息輸入到A/D轉換器中進行轉換,計算機器人的傾倒角度和傾倒角速度;然后調用PID算法計算電機控制數據,并通過CAN口輸出給電機驅動器。

伺服電機相關文章:伺服電機工作原理












評論