可編程控制器解決車輛分散驅動的同步控制問題

取自編碼器采集的脈沖信號, 經高速計數模塊FM350- 1 進入PLC, 轉換成電機速度數據。將兩個電機編碼器的信號相比較, 通過PID 調節模塊, 調整電機轉速差值, 給定電機2 的轉速值MW1000。
MW1000 需要轉化成變頻器能接受的信號。由于PLC的對應4~20mA 值為0~27648, 變頻器接收范圍值為0~8192, 所以MW1000/27648×8192 送到模擬量輸出通道, 換算成變頻器能接受的電流信號, 以控制牽引電機2 的變頻器, PID 算法是工業控制中最常用的一種數學算法, 其基本算式如下:
Pou (t t) =Kp×(et) +Ki×Σ(et) +Kd×[ (et) - (et- 1) ]
式中:Kp―比例調節系數。是按比例反映系統的偏差,系統一旦出現偏差, 比例調節立即產生調節作用, 以減少誤差。
Ki ―積分調節系數。使系統消除穩態誤差, 提高無差度。積分作用的強弱取決于積分時間,常數Ti 越小, 積分作用就越強。Kd―微分調節系數。微分作用反映系統偏差信號的變化率, 具有預見性, 能預見偏差變化的趨勢, 因此能產生超前的控制作用, 在偏差還沒有形成之前, 已被微分調節作用消除。為了減少電源系統波動等因素引起的外來干擾,在編制控制算法時, 必須考慮利用積分環節, 即采用一段時間內連續穩定的輸入信號而不是某一瞬時值的輸入信號進行PID 運算, 以消除累積誤差, 使轉數在一定的范圍內可調。這樣, 牽引電機1 和牽引電機2 就能很好地進行同步控制且同步精度較高, 從而確保了運行機構的穩定性。
4 控制結果
利用 STEP7 編制PLC 上位機監控程序,Wincc采集速度值并繪制曲線。數據提取的時間間隔為15ms。實際上牽引電機1 和牽引電機2 速度是相同的, 但為了反映牽引電機2 的跟蹤和波動情況, 在此特地將其分開, 上面是牽引電機1 的速度曲線, 下面是牽引電機2 的速度曲線(見圖4) 。牽引電機1 的速度發生變化時, 牽引電機2 就能及時地響應, 進行跟蹤, 并且能很快地達到穩定。實驗表明, 采用PLC 和變頻器的控制方法, 能達到較高的同步要求, 響應快、速度波動幅度較小。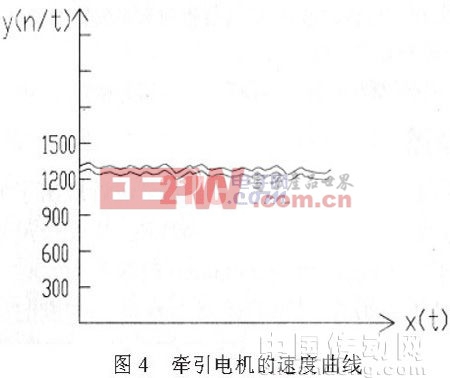
MW1000 需要轉化成變頻器能接受的信號。由于PLC的對應4~20mA 值為0~27648, 變頻器接收范圍值為0~8192, 所以MW1000/27648×8192 送到模擬量輸出通道, 換算成變頻器能接受的電流信號, 以控制牽引電機2 的變頻器, PID 算法是工業控制中最常用的一種數學算法, 其基本算式如下:
Pou (t t) =Kp×(et) +Ki×Σ(et) +Kd×[ (et) - (et- 1) ]
式中:Kp―比例調節系數。是按比例反映系統的偏差,系統一旦出現偏差, 比例調節立即產生調節作用, 以減少誤差。
Ki ―積分調節系數。使系統消除穩態誤差, 提高無差度。積分作用的強弱取決于積分時間,常數Ti 越小, 積分作用就越強。Kd―微分調節系數。微分作用反映系統偏差信號的變化率, 具有預見性, 能預見偏差變化的趨勢, 因此能產生超前的控制作用, 在偏差還沒有形成之前, 已被微分調節作用消除。為了減少電源系統波動等因素引起的外來干擾,在編制控制算法時, 必須考慮利用積分環節, 即采用一段時間內連續穩定的輸入信號而不是某一瞬時值的輸入信號進行PID 運算, 以消除累積誤差, 使轉數在一定的范圍內可調。這樣, 牽引電機1 和牽引電機2 就能很好地進行同步控制且同步精度較高, 從而確保了運行機構的穩定性。
4 控制結果
利用 STEP7 編制PLC 上位機監控程序,Wincc采集速度值并繪制曲線。數據提取的時間間隔為15ms。實際上牽引電機1 和牽引電機2 速度是相同的, 但為了反映牽引電機2 的跟蹤和波動情況, 在此特地將其分開, 上面是牽引電機1 的速度曲線, 下面是牽引電機2 的速度曲線(見圖4) 。牽引電機1 的速度發生變化時, 牽引電機2 就能及時地響應, 進行跟蹤, 并且能很快地達到穩定。實驗表明, 采用PLC 和變頻器的控制方法, 能達到較高的同步要求, 響應快、速度波動幅度較小。
5 結束語
該控制方法已在各種爐下車輛中應用。實際應用中, 走行同步起動效果明顯, 車輛運行平穩。實踐證明, 采用PLC 解決車輛分散驅動時電機速度同步的控制方法應用效果較好, 是一種理想的調速控制方法, 滿足了生產工藝要求, 減少了設備的維修維護費用, 保證了車輛發揮正常的生產效率, 經濟效益顯著。隨著PLC 與變頻器控制方法的廣泛應用, 必將更好地提高傳動系統對a
主站蜘蛛池模板:
丰台区|
图们市|
宜宾县|
南宁市|
南阳市|
昌乐县|
南郑县|
新竹县|
合江县|
平山县|
清徐县|
神池县|
望都县|
富裕县|
天镇县|
大理市|
富宁县|
五莲县|
团风县|
漠河县|
临江市|
酒泉市|
闽侯县|
澄城县|
衡南县|
健康|
亳州市|
新巴尔虎右旗|
华坪县|
珲春市|
安仁县|
咸阳市|
开鲁县|
长汀县|
衡阳市|
怀化市|
荣昌县|
南雄市|
巴中市|
溆浦县|
宁阳县|
該控制方法已在各種爐下車輛中應用。實際應用中, 走行同步起動效果明顯, 車輛運行平穩。實踐證明, 采用PLC 解決車輛分散驅動時電機速度同步的控制方法應用效果較好, 是一種理想的調速控制方法, 滿足了生產工藝要求, 減少了設備的維修維護費用, 保證了車輛發揮正常的生產效率, 經濟效益顯著。隨著PLC 與變頻器控制方法的廣泛應用, 必將更好地提高傳動系統對a

pid控制器相關文章:pid控制器原理









評論