基于LPC2119的自主式移動機器人設計

關鍵詞: 移動機器人 LPC2119 PWM PTR2000
自主式移動機器人系統是指根據指令任務及環境信息進行自主路徑規劃,并且在任務執行過程中不斷采集局部環境信息,做出決策,從而實現安全行駛并準確到達目標地點的智能系統。本文以LPC2119為控制核心,介紹了一種輪式移動機器人的設計方案。該機器人系統應用超聲傳感器、光敏傳感器、碰撞傳感器采集外部環境信息,采用PTR2000實現移動機器人與計算機通信,從而實現現場信息的反饋和計算機控制命令的發送。
LPC2119是Philips公司推出的支持實時仿真和跟蹤的ARM7TDMI-S微處理器,嵌入128KB高速Flash存儲器。它采用3級流水線技術,取指、譯碼和執行同時進行,能夠并行處理指令,提高CPU運行速度。由于其具有非常小的尺寸和極低的功耗,非常適合小型化應用。片內多達64KB的SRAM,具有較大的緩沖區規模和強大的處理能力。LPC2119內部集成2個CAN控制器、2個32位定時計數器和4個ADC單元電路。
1 硬件結構
控制器LPC2119主要用來產生2路PWM信號以及處理傳感器信息,實現對小車的智能控制。本系統采用IR2110作為H橋電路驅動芯片,用4片STP60NE06搭接H橋電路驅動直流電機,并利用光電編碼器檢測電機轉速;采用16路超聲傳感器系統作為系統的避碰和簡單測距;采用光敏傳感器實現機器人對光源的感知和尋找;采用碰撞傳感器感知碰撞,使機器人能做出急時處理;采用無線通信芯片PTR2000實現機器人與計算機的無線通信。
1.1 電機的PWM控制
IR2110是美國IR(International Rectifier)公司推出的一種雙通道、高壓、高速的功率器件柵極驅動的單片式集成驅動器。它把驅動高壓側和低壓側MOSFET或IGBT所需的絕大部分功能集成在一個高性能的封裝內,外接很少的分立元件即能提供極快的開關速度和極低的功耗。其特點在于:將輸入邏輯信號轉換成同相位低阻抗輸出驅動信號,可驅動同一橋臂上的2路輸出,驅動能力強,響應速度快;工作電壓較高,可達600V;內設欠壓封鎖;成本低、易于調試;電路芯片體積小,為DIP14封裝。高壓側驅動采用外部自舉電容上電,與其他IC驅動電路相比,在設計上大大減少了驅動變壓器和電容的數目,降低了產品成本,減小了體積,提高了系統的可靠性。這種適用于驅動功率MOSFET和IGBT的自舉式集成電路,在電源變換、電機調速等功率驅動領域中獲得了廣泛的應用。
LPC2119單片機的PWM功能建立在標準定時器上,它具有32位的定時控制器及預分頻控制器、7個匹配控制器,可實現6個單邊PWM或3個雙邊PWM輸出,也可以使用這兩種類型的混合輸出。此系統使用端口PWM0和PWM1輸出兩路PWM信號,分別控制移動機器人的2個驅動電機。PWM信號經過光電耦合器形成兩路相位相差180°的信號加到IR2110的HIN和LIN引腳上,實現對同一橋臂上的兩個MOSFET開關的控制,原理如圖1所示。
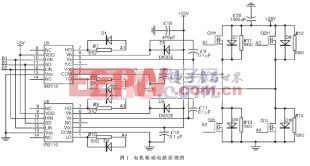
HIN為高電平期間,Q1、Q4導通,在直流電機上加正向工作電壓;HIN為低電平期間,LIN端輸入高電平,Q2、Q3導通,在直流電機上加反向工作電壓。因此電樞上的工作電壓是雙極性矩形脈沖波形。由于機械慣性的作用,矩形脈沖電壓的平均值決定電動機的轉向和轉速。
1.2 超聲傳感器系統
為減輕控制器LPC2119的負擔,超聲傳感器系統由Atmel公司的AT89C1051單片機控制。1051單片機是含有一個1KB可編程E2PROM的高性能微控制器,它與工業標準MCS-51的指令和引腳兼容。它為很多嵌入式控制應用提供了一個高度靈活、有效的解決方案。AT89C1051有以下特點:1KB的E2PROM、128B的RAM、15根I/O線、2個16位定時/計數器、5個二級向量中斷結構、1個全雙向的串行口且內含精密模擬比較器和片內振蕩器,具有4.25~5.5V的電壓工作范圍及24MHz工作頻率,同時還具有加密陣列的二級程序存儲器加鎖、掉電和時鐘電路等。此外,AT89C1051還支持兩種軟件設置的電源節電方式。空閑時,CPU停止,而RAM、定時/計數器、串行口和中斷系統繼續工作。掉電時,保存RAM的內容,但振蕩器停振以禁止芯片其他功能,直到下一次硬件復位。
1051控制每60ms發送一路超聲波,檢測回波時間,并完成距離的計算。這樣16路超聲波循環檢測一次約為1s,在常溫時超聲波的速度約為344m/s,可以計算出障礙物的距離,最后將超聲波傳感器編號及距離信息傳送給LPC2119。










評論