無刷直流電機驅動控制器的S0PC技術研究

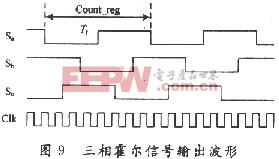
位置信號通過三個霍爾傳感器得到,每一個霍爾傳感器都會產生180°脈寬的輸出信號,如圖9所示。Sa,Sb,Sc分別表示三相霍爾信號,Clk為高頻時鐘脈沖。電機測速分為M法、T法和M/T法,T法測速適用于低速段,本設計采用T法測速。通過對霍爾信號Sa的每個周期用一個計數器對主時鐘脈沖進行計數,通過除法器計算轉速,計算公式如下:
Speed_out=60×f0/Z×Count_reg
式中:f0為系統時鐘;Count_reg為霍爾信號一個周期內的脈沖計數值;Z為電機轉一圈輸出的霍爾信號個數,因為是五對極電機,所以Z=5。
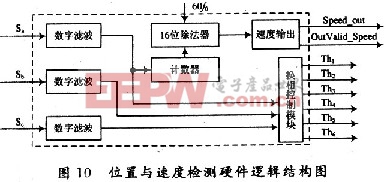
圖10為位置與速度檢測硬件邏輯結構圖,三相霍爾信號通過數字濾波模塊后,以霍爾信號Sa為條件的計數器啟動計數,作為16位除法器的分母輸入,經過除法運算,在下一個霍爾信號Sa周期內輸出速度計算結果Speed_out及模塊輸出有效信號OutValid_Speed。運算時間與除法器的內部結構有關。本文引用地址:http://www.104case.com/article/162957.htm
4 實驗結果
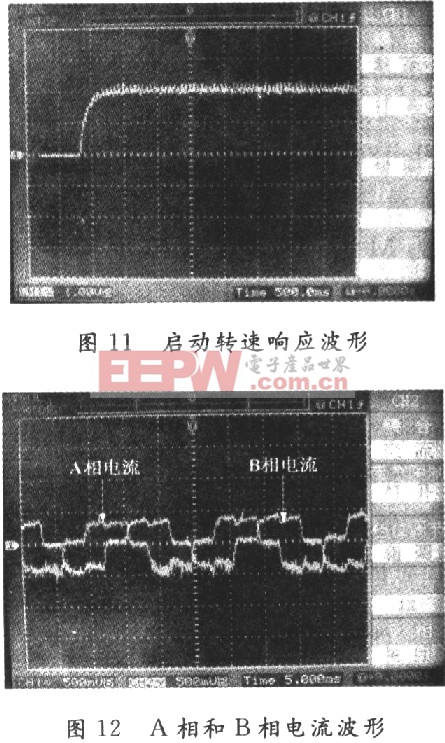
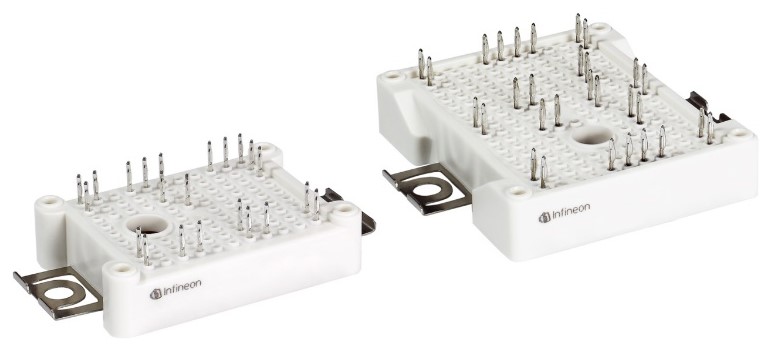
采用額定功率PN=300 W,額定電壓UN=220 V,額定轉速nN=3000 r/min,額定電流IN=1.6 A,額定轉矩TN=O.96 Nm的無刷直流電機進行實驗,整個實驗系統還包括以FPGA為主的控制單元、功率電路和測功機負載實驗平臺,實驗中采用轉速、電流雙閉環調節方式。電機給定轉速1000 r/min時,空載啟動響應波形如圖11所示,調節時間為300 ms,穩態性能良好;利用測功機對系統進行加載測試,負載0.3 Nm時A相和B相電流波形如圖12所示,充分證明了該控制器的正確性,也說明電機運行穩定。
5 結語
采用FPGA硬件可編程邏輯器件,以純硬件的方式實現無刷直流電機的控制,對無刷直流電機控制的結果表明,該電路能有效地對無刷直流電機進行雙閉環控制。設計特點是控制電機的所有外圍電路包括PI調節算法均采用FPGA實現,真正實現電機的SOPC控制,系統實時性高、可靠性強。

霍爾傳感器相關文章:霍爾傳感器工作原理
霍爾傳感器相關文章:霍爾傳感器原理









評論