基于MEMS器件的低成本微慣性導(dǎo)航系統(tǒng)設(shè)計(jì)

5 結(jié)語(yǔ)
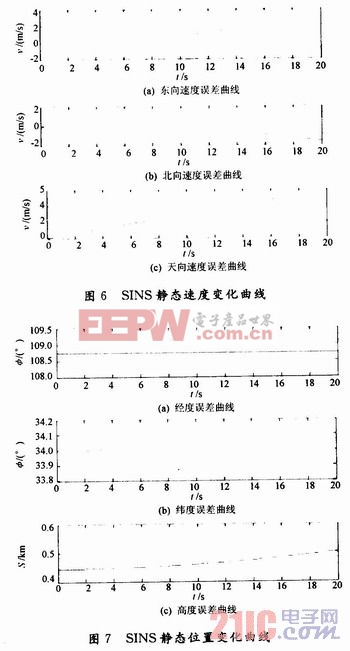
在此首先介紹了采用MEMS慣性傳感器設(shè)計(jì)的微慣性測(cè)量單元。由于選用的微慣性傳感器精度比較低,信號(hào)存在較大的噪聲,個(gè)別點(diǎn)出現(xiàn)野值現(xiàn)象,所以引入信號(hào)預(yù)處理。根據(jù)陀螺及加速度計(jì)測(cè)量的實(shí)時(shí)信息,通過(guò)“四元數(shù)”法,完成導(dǎo)航解算,輸出運(yùn)載體的航向速度及位置信息。分析實(shí)驗(yàn)結(jié)果可知,此系統(tǒng)短期精度較高,但誤差隨時(shí)間發(fā)散非常快,為保證長(zhǎng)時(shí)間使用,可以采用SINS/GPS組合導(dǎo)航方式,通過(guò)卡爾曼濾波來(lái)抑制發(fā)散,提供測(cè)量精度,這也是我們以后工作的重點(diǎn)。
本文引用地址:http://www.104case.com/article/162532.htm












評(píng)論