基于MEMS器件的低成本微慣性導(dǎo)航系統(tǒng)設(shè)計(jì)

摘要:設(shè)計(jì)了一款基于MEMS陀螺和MEMS加速度計(jì)的低成本微慣性導(dǎo)航系統(tǒng)。采用“四元數(shù)”法進(jìn)行姿態(tài)計(jì)算,通過(guò)比力變換、積分運(yùn)算確定栽體的速度、位置。分析樣機(jī)運(yùn)行結(jié)果可知,靜態(tài)運(yùn)行15 s,姿態(tài)誤差最大為1.2°,速度誤差最大為4.5 m/s,位置誤差最大為33 m。實(shí)驗(yàn)表明,該系統(tǒng)發(fā)散較快,但短期精度較高,為滿足長(zhǎng)時(shí)間導(dǎo)航,必須與其他導(dǎo)航如GPS組合,即可應(yīng)用到普通導(dǎo)航領(lǐng)域,且能大大降低系統(tǒng)的成本和體積。
關(guān)鍵詞:微慣性導(dǎo)航系統(tǒng);預(yù)處理;捷聯(lián)解算;MEMS陀螺
與傳統(tǒng)的慣性導(dǎo)航系統(tǒng)相比,由MEMS陀螺和MEMS加速度計(jì)構(gòu)成的微慣性導(dǎo)航系統(tǒng)在成本、體積、重量等方面均具有顯著優(yōu)勢(shì),在飛機(jī)、導(dǎo)彈和艦船等軍事及民用領(lǐng)域均具有廣闊的應(yīng)用前景。由于技術(shù)水平的局限,現(xiàn)今基于MEMS技術(shù)的微陀螺精度還不是很高,與光纖陀螺還有數(shù)量級(jí)的差距,但價(jià)格與之相比卻非常低。MEMS加速度計(jì)是所有MEMS傳感器中商業(yè)化應(yīng)用最成功的,精度上已經(jīng)能夠滿足軍事應(yīng)用要求。在此使用目前市場(chǎng)上的MEMS加速度計(jì)和低精度 MEMS陀螺來(lái)設(shè)計(jì)低成本微慣性導(dǎo)航系統(tǒng),可用于對(duì)精度要求不高,但對(duì)成本比較敏感的領(lǐng)域,如小型無(wú)人機(jī)等。
1 微慣性導(dǎo)航系統(tǒng)硬件設(shè)計(jì)
設(shè)計(jì)的微慣性導(dǎo)航系統(tǒng)硬件主要包括MEMS慣性傳感器及信號(hào)調(diào)理模塊、信號(hào)采集處理與傳輸模塊、導(dǎo)航計(jì)算機(jī)及顯示模塊。其結(jié)構(gòu)框圖如圖1所示。微慣性傳感器是慣性導(dǎo)航系統(tǒng)的核心敏感器件,其誤差是導(dǎo)航系統(tǒng)的主要誤差來(lái)源,其精度直接決定了導(dǎo)航的精度。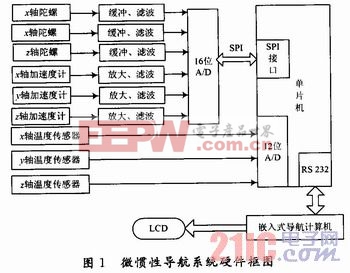
選擇ADI公司的ADuC842單片機(jī),該單片機(jī)主頻可達(dá)16.67 MHz,片上自帶8路12位A/D,可用于溫度傳感器信號(hào)的采集,并完成陀螺和加速度計(jì)信號(hào)的讀取、預(yù)處理以及溫漂補(bǔ)償?shù)炔僮鳎罱K通過(guò)RS 232與導(dǎo)航計(jì)算機(jī)通信。
1.1 微慣性傳感器模塊
MEMS慣性傳感器模塊中的三軸陀螺由ADI公司3個(gè)單軸MEMS角速度傳感器ADXRS150組成,其角速度范圍為150°/s;三軸加速度計(jì)采用 ADI公司的MEMS加速度傳感器ADXL103和ADXL203組成,其中ADXL103是單軸加速度傳感器,ADXL203是單芯片雙軸加速度傳感器,將其正交放置組成三軸加速度計(jì)來(lái)測(cè)量運(yùn)行載體沿其正交軸方向的線加速度。所選陀螺及加速度計(jì)均采用微機(jī)械技術(shù),性能優(yōu)越、價(jià)格低廉,具有較高的性價(jià)比。根據(jù)慣性傳感器信號(hào)特點(diǎn)及A/D輸入范圍,系統(tǒng)的信號(hào)調(diào)理模塊主要包括信號(hào)的放大和低通濾波處理。選擇具有高精度、零漂移、軌對(duì)軌特點(diǎn)的運(yùn)算放大器作為信號(hào)放大及緩沖器來(lái)滿足設(shè)計(jì)需要;陀螺性能好壞主要取決于陀螺漂移,而陀螺噪聲是引起陀螺漂移的一個(gè)重要因素,在此設(shè)計(jì)的陀螺工作帶寬在40 Hz,設(shè)計(jì)中增加了低通濾波器電路,以濾除40 Hz以外的干擾噪聲。












評(píng)論