基于MEMS器件的低成本微慣性導航系統設計

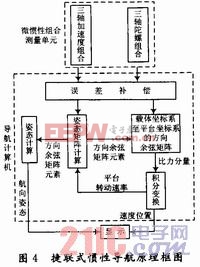
3.3 姿態矩陣的計算
經過式(2),式(3)實時計算出四元數后,由對姿態矩陣更新計算,再通過即可獲得載體更新的姿態角。

3.4 速度位置的計算
加速度測量的比力信息fx,fy,fz,通過姿態矩陣轉化到導航坐標系后記為Fx,Fy,Fz,轉換由式(4)確定。東北天方向的速度VE,VN,VU由對加速度做積分運算確定,經度λ、緯度φ高度h由對速度做積分運算確定,分別見公式(5),式(6)。
 本文引用地址:http://www.104case.com/article/162532.htm
本文引用地址:http://www.104case.com/article/162532.htm![]()
4 實驗結果及分析
為了測定所設計的低成本捷聯式慣性導航系統的性能和精度,進行了大量的實驗室靜態測試,圖5,圖6,圖7為原理樣機實時運行20 s的靜態測試結果。由圖可知,樣機靜態運行15 s,姿態誤差最大為1.2°,速度誤差最大為4.5 m/s,位置誤差最大為33 m。分析實驗結
果可知,樣機運行在較短時間內,捷聯解算結果良好。但是長時間運行,誤差發散比較嚴重,主要原因有2個,其一是考慮低成本設計,所選用的MEMS慣性傳感器精度比較低,與普通導航所用的慣性傳感器精度有數量級的差距;其二,選用的導航方式為捷聯式慣性導航,而捷聯式系統為發散系統,本身誤差有積累效應,時間越長誤差越大。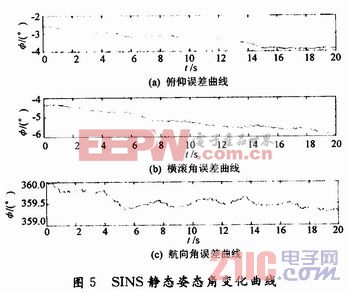












評論