基于ARM的嵌入式航空拖靶高度控制器設計

3 半實物仿真實驗及結果
在自行開發的半實物仿真平臺上,對研制的拖靶高度控制器樣機進行了仿真驗證。拖靶飛行動力學和運動學模型、無線電高度表信號、加速度計信號通過計算機模擬,再接入高度控制計算機、舵機等實物構成仿真回路。仿真步長為5 ms,仿真計算精度為64 b(雙精度浮點)。仿真結果如圖7~圖10所示,本文給出了4種主要干擾條件下的結果,拖靶裝訂基準高度為15 m。本文引用地址:http://www.104case.com/article/162239.htm
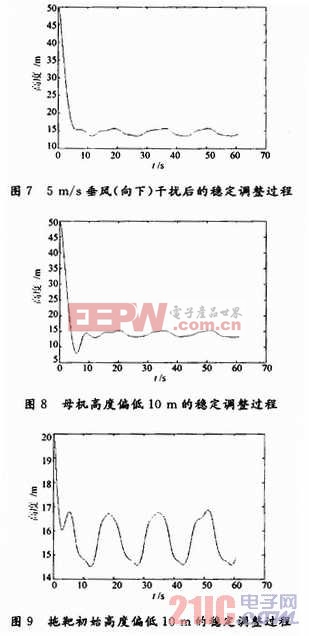
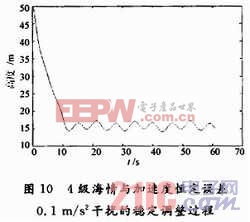
仿真結果表明,在垂風、母機高度偏差、拖靶初始高度偏差、四級海情產生高度表噪聲影響和加速度計測量誤差影響的情況下,系統能夠控制拖靶平穩進入定高飛行狀態,受到干擾偏離基準高度后,高度控制器能進行快速修正,使拖靶能夠很快回到預定基準高度,并按精度要求保持在預定高度飛行,系統靜動態響應指標滿足設計要求,控高精度均可達2 m。
4 結語
本文采用嵌入式技術設計的航空拖靶高度控制器,可控制拖靶實現超低空、高精度的掠海定高飛行,達到了設計目標。設計中以ARM7嵌入式微處理器為核心進行了硬件研制,并基于μC/OS-Ⅱ實時嵌入式操作系統進行了應用軟件開發,將嵌入式技術及其優點成功應用于該控制器的研制,取得了較好的效果。








評論