基于ARM的嵌入式航空拖靶高度控制器設計

2 控制器軟硬件設計
高度控制器的設計主要包括3個部分的內容:高度控制計算機控制律解算主板的設計、高度控制計算機舵機驅動控制板的設計、傳感器與執行機構的選型及配置設計。其中,控制律解算主板是整個系統的核心,因此,全系統的設計也是圍繞這個核心進行的。
2.1 控制律解算主板
(1)硬件設計。高度控制律解算板主要功能是在收到開高控指令時,對接收到的無線電高度表信號和采集到的加速度計信號以及設定的飛行高度值按照控制律實時解算出升降翼偏轉角(周期為20 ms),并變換成相應的PWM占空比送給舵機驅動控制板實現對升降翼偏轉角控制;同時還具有裝定拖靶定高飛行高度值、對無線電高度表輸出進行調零、對加速度計輸出進行調零和比例調整、對升降翼偏轉角進行調零和比例調整、接收遙控遙測分系統開/關高控指令和向其實時傳送拖靶狀態參數等功能。控制律解算主板采用基于ARM7的嵌入式微處理器設計。高度控制律解算板的原理框圖如圖3所示。本文引用地址:http://www.104case.com/article/162239.htm
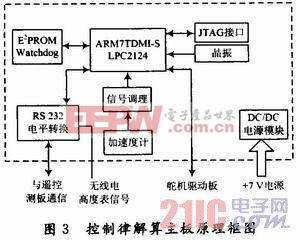
這里所選用的中央處理器是ARM7TDMI-S體系結構的32位微處理器芯片LPC2124。該處理器集成有16 KB的內部RAM和128 KB的內部FLASH存儲器,這些資源能夠滿足μC/OS-Ⅱ嵌入式實時操作系統的運行要求。除此之外還集成有2路UART串口、4路10位A/D轉換器、1個I2C接口、2個SPI接口、6路PWM輸出以及多路通用I/O口,分別用于與地面調參器通信進行高度裝定及其他參數的校正、與雷達高度表通信以獲取高度值、對加速度計輸出進行AD采樣、與小容量的E2PROM芯片進行數據讀/寫以修改和保存設置的參數、控制舵機工作等功能。選用該芯片可以極大地簡化外圍電路的設計,縮小電路板尺寸,提高系統運行的可靠性。
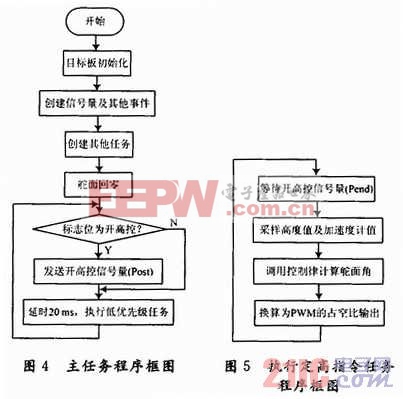
(2)軟件設計。高度控制律解算板中的應用程序是運行在嵌入式實時操作系統μC/OS-Ⅱ下,該系統具有可移植、裁剪、源代碼公開、多任務和基于優先級的搶占式任務調度等特點,實時性好,可靠性高。應用程序分解為任務優先級不同的6個任務,每個任務都是一個無限循環程序,任務間通過信號量、郵箱或者其他事件來傳遞。按任務優先級依次遞減分別是主任務(目標板初始化和建立其他任務,任務優先級最高)、串口0接收數據任務、串口1接收數據任務、執行定高指令任務、慢速數據采樣任務、串口0發送數據任務。
應用程序首先運行主任務(見圖4),在執行延時20 ms等待操作時操作系統自動執行較低任務優先級的任務,在這里即為串口0接收數據任務,這個任務的功能是接收遙控/遙測分系統發送來的指令數據或者是調參器發送來的其他指令,當接收到開高控指令時則設置開高控標志位,在沒有繼續收到數據時則執行較低任務優先級的任務,即串口1接收數據任務,這是接收無線電高度表發送來的高度值并更新相應的高度全局變量。執行定高指令任務(見圖5)是由主任務通過發送開高控信號量來啟動的,當串口0接收數據任務設置了開高控標志位后,主任務便每間隔20 ms啟動一次執行定高指令任務,利用上次的解算結果及當前的垂向加速度值和高度值進行控制律解算,得出升降翼偏轉角并換算為相應的PWM占空比送給舵機驅動板控制舵機的偏轉。慢速數據采樣任務是1 Hz的速率采集靶載蓄電池的電壓、加速度以及無線電高度表等值并更新相應的全局變量。串口0發送任務是以5 Hz的速率向遙控遙測板發送拖靶的參數值,包括靶載蓄電池電壓、加速度值、無線電高度表值、設定高度值以及解算出的舵偏角值等。下面給出的是主任務程序框圖和執行定高指令任務程序框圖。








評論