基于ARM的嵌入式航空拖靶高度控制器設計

摘要:嵌入式系統具有實時性好、可靠性高、體積小和功耗低等優勢,將該技術引入新型航空拖靶高度控制器的設計,可顯著提高其綜合性能。基于ARM7微處理器和μC/OS-Ⅱ嵌入式實時操作系統開發了航空拖靶高度控制器,主要介紹了控制器的組成、原理和軟硬件設計過程。原理樣機的半實物仿真結果表明系統響應快、控制精度高,能夠準確控制拖靶做超低空掠海定高飛行,達到了設計要求,控高精度可達2m。
關鍵詞:航空拖靶;嵌入式系統;ARM;μC/OS-Ⅱ;高度控制器
0 引言
航空拖靶是一種由飛機拖曳飛行的特殊的無人飛行器,一套完整的拖靶系統主要包括拖帶飛機、收放纜裝置、拖纜和拖靶。其中拖帶飛機一般為有人或無人駕駛飛機,收放纜裝置一般為掛裝在飛機上的電動或氣動式絞車,拖纜是通過絞車收放的一根長約幾千米而直徑只有幾毫米的鋼纜,拖靶多為外形類似導彈的無動力飛行器,由拖纜牽引飛行。主要用途是模擬敵方來襲的導彈類目標,為己方對空導彈、火炮等防空武器系統試驗或訓練提供模擬目標。
隨著技術的進步,現代反艦導彈多采取“超低空掠海飛行”的突防方式。與之相應,20世紀80年代以來,用于模擬反艦導彈類目標的航空拖靶,也向著這一方向快速發展。而這類拖靶都要裝有高度控制器,才能實現模擬導彈的超低空掠海定高飛行能力。其中,高度控制器是核心設備,控制精度、實時性和可靠性都有較高要求。同時,伴隨著計算機技術的快速發展,以應用為中心的“嵌入式系統”以其實時性好、可靠性高、體積小、重量輕、成本低和軟硬件可裁減等優勢,正在被廣泛應用于各個領域。因此,考慮到拖靶高度控制器的設計要求與嵌入式系統的應用場合非常符合,本文基于ARM7嵌入式微處理器和μC/OS-Ⅱ嵌入式實時操作系統,設計開發了航空拖靶的高度控制器。
1 控制器組成和工作原理
高度控制器主要由無線電高度表、垂向線加速度計、控制律解算主板、舵機驅動控制板及舵機組成,其中加速度計、控制律解算主板和舵機控制板集成在一個高度控制計算機盒內,其組成如圖1所示。

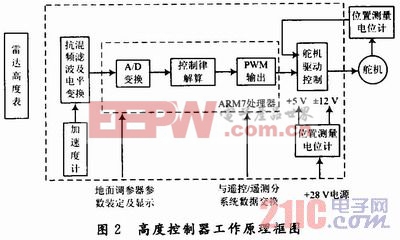
高度控制計算機是系統的中樞,它接收無線電高度表信號和加速度計信號。控制律解算主板首先對這2路信號進行抗混頻濾波和電平轉換等前置處理后送入A/D通道,再進行控制律解算,給出升降翼偏角的PWM控制信號至舵機驅動控制板,經舵機驅動控制板放大輸出驅動舵機,舵機驅動升降翼來調整拖靶的飛行高度。系統每20 ms進行一次控制律解算。工作原理框圖如圖2所示。








評論