基于ARM的嵌入式航空拖靶高度控制器設計

2.2 舵機驅動控制板
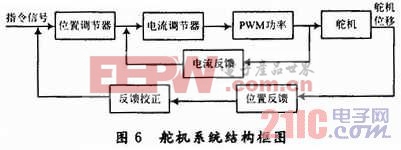
舵機驅動控制板和電動舵機以及位置反饋電位計構成了拖靶的舵機系統。舵機系統采用雙閉環即電流環和位置環的控制結構。電流環作為內環,用于抑制轉矩和電流的波動,減小功放死區,提高線性度。位置環是舵機系統的主回路,目的是保證較好的位置控制精度。由于拖靶自身的穩定性較好,故舵回路不采用速度環,而引入適當的微分器,以改善系統阻尼,提高系統剛度,減小各種非線性因素的影響。舵機系統結構框圖如圖6所示。本文引用地址:http://www.104case.com/article/162239.htm
舵機驅動控制板包含采用模擬電路實現的位置調節器、電流調節器、PWM功放和反饋校正網絡。考慮到舵機系統的響應速度,位置調節器和電流調節器均采用簡單的比例式調節規律,由模擬集成運放AD822AN實現。位置反饋是舵機系統的主反饋,升降翼面的定位精度主要取決于位置傳感器的精度。標準電阻是小功率系統中常用的一種電流傳感器,因其簡單可靠、阻值穩定、精度高、頻響好、輸出標準電壓直接比例于所通過的電流,因而在PWM系統中得到了廣泛應用,故采用標準取樣電阻作電流傳感器。舵機驅動控制板圍繞直流電機驅動器專用集成電路L292設計了其外圍電路,L292是一種PWM直流電機驅動器專用集成電路。與線性功放相比,PWM功放具有功耗低、效率高、工作穩定可靠等優點,尤其是它的動力潤滑作用,對減小舵機死區,改善靜態精度和低速爬行非常有利。它的驅動能力強,可達2A/36V,集成度高,開關頻率可外部設定,片內設有過載保護和欠壓保護等功能。
2.3 傳感器與舵機執行機構配置
(1)無線電高度表。采用調頻/連續波(FM/CW)體制,工作頻率4 200~4 400 MHz,測高范圍0~300 m。高度輸出形式為232數字信號或模擬電壓輸出兩種格式,周期為20 ms。兩種輸出格式可通過發送指令進行選擇,這里使用的是精簡格式,一幀數據為4 B,前2 B和后2 B表示同一高度值,低位在前,高位在后。
(2)加速度計。加速度計安裝在拖靶的重心位置,集成在高度控制計算機機盒內,用于測量拖靶的垂直方向加速度,選用ADXL105AQC加速度計芯片,精度±1g~±5g,單通道模擬輸出,分辨率2 mg。工作電壓為單電源2.7~5.25 V,具有自檢功能,芯片自帶溫度傳感器模擬輸出,還帶有運算放大器,10 kHz的工作帶寬。
(3)舵機及執行機構。包括力矩舵機、螺旋傳動機構、搖臂和直滑式位移傳感器。舵機采用齒輪減速永磁直流力矩電機,額定轉矩0.3 nm,額定電流0.3 A,額定電壓27 V,額定轉速(80±8)r/min,空載轉速90 r/min。舵機以螺旋傳動方式來操縱舵面,同時靠搖臂帶動直滑式導電塑料位移傳感器反饋升降翼面偏轉角度。這里的位移傳感器選用直滑式精密導電塑料電位器做位置傳感器,其行程為3 cm,阻值為2 kΩ,獨立線性度為0.1%。
linux操作系統文章專題:linux操作系統詳解(linux不再難懂)







評論