微陣列加速度傳感器的設(shè)計理論

建立引信系統(tǒng)環(huán)境識別(如多向加速度)與參數(shù)估計的多維信息處理理論產(chǎn)生新的引信原理是當前重要的研究方向。如對硬目標的侵徹或貫穿裝甲所使用的巡航導(dǎo)彈、激光制導(dǎo)炸彈等,都存在多向加速度的探測問題。因此大量程的能測量105 g微加速度計具有非常重要的應(yīng)用價值。目前微陣列式加速度計發(fā)展非常
迅速,它對提高武器作戰(zhàn)水平,改進武器性能起著十分重要作用。另外汽車上的安全氣囊,在微機器人中,執(zhí)行器動作的運動速度、加速度和力的大小的檢測都需要微陣列式加速度傳感器。因此微陣列式加速度傳感器的應(yīng)用范圍廣,前景十分看好。
隨著集成電路平面加工工藝技術(shù)日趨成熟,微加工中的三維加工工藝不斷地發(fā)展,使微傳感器、微馬達、微泵等制造已成為現(xiàn)實。文獻[1]曾提出了傳感陣列的布陣設(shè)計問題,但未展開研究。本文在文獻[2~4]的研究基礎(chǔ)上系統(tǒng)、綜合地研究了微陣列式加速度傳感器,根據(jù)理論研究和實驗分析,應(yīng)按加速度值的大小進行微陣列式加速度傳感器的研制。
微陣列加速度傳感器的設(shè)計理論
加速度的影響因素與加速度之間呈現(xiàn)某種關(guān)系,應(yīng)用多元回歸理論研究加速度場的數(shù)學(xué)模型,當其關(guān)系是線性時,應(yīng)用線性回歸理論研究,建立數(shù)學(xué)模型及其評估方法,而為非線性時,應(yīng)用非線性回歸理論
研究,建立數(shù)學(xué)模型及其評估方法。
1.1 線性回歸分析
設(shè)加速度Y與其影響因素X1, X2,…, XP存在線性關(guān)系,則其數(shù)學(xué)模型為
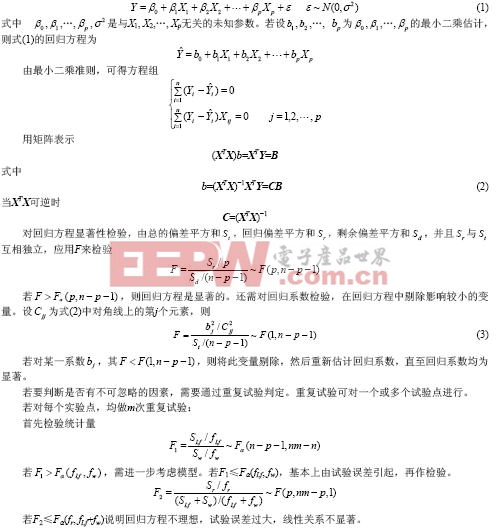
據(jù)此,可應(yīng)用逐步線性回歸的方法,將因子一個個地引入,引入的條件是該因子的偏回歸平方和經(jīng)檢驗是顯著的,同時,每引入一個因子,要對老因子逐個檢驗,將偏回歸平方和變?yōu)椴伙@著的因子剔除。
逐步線性回歸算法流程如下:
1) 設(shè)定函數(shù)FunInitial( )是輸入的實驗數(shù)據(jù)建立結(jié)構(gòu)矩陣X、觀察值矩陣Y、自相關(guān)系數(shù)矩陣R、常數(shù)矩陣B、增廣矩陣R(0),并且設(shè)置相應(yīng)的初始化值,函數(shù)FunAssesGet( )引入因子時,計算偏回歸平方和及檢驗的函數(shù);2) 函數(shù)FunAssesPel( )引入一個因子后,做剔除舊因子的檢驗函數(shù);3) 數(shù)組均用首元素表示當前已被使用的數(shù)組數(shù)目;4) 數(shù)組Already Trans Row [n]記錄已經(jīng)被檢驗過,放入回歸方程中的因子下標;5) 整數(shù)
變量L用來計數(shù),對n-1次可能的引入因子的處理加以限制;6) 整數(shù)變量T, rausRow表示當前要進行R矩陣變換的行,當其值為−1,表示沒有轉(zhuǎn)化的行,程序最終輸出有效的回歸方程。
1.2 非線性回歸分析
當測試加速度與影響因素呈非線性關(guān)系,則需建立非線性模型,并應(yīng)用阻尼最小二乘法解決。
1) 非線性回歸數(shù)學(xué)模型及分析方法
假設(shè)函數(shù)

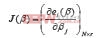 同時對阻尼因子的調(diào)整作了研究,使阻尼的確定和計算速度滿足實際應(yīng)用的要求。
同時對阻尼因子的調(diào)整作了研究,使阻尼的確定和計算速度滿足實際應(yīng)用的要求。

pid控制器相關(guān)文章:pid控制器原理










評論