基于單輪車輛懸架的Fuzzy-PID控制器設(shè)計和仿真

摘要:研究車輛主動空氣懸架的控制問題,在車輛主動空氣懸的常規(guī)PID控制器的基礎(chǔ)上,運用模糊推理對常規(guī)PID控削器進行參數(shù)在線修訂,設(shè)計了基于單輪車輛主動空氣懸架的Fuzzy-PID控制器,并對Fuzzy-PID控制的單輪車輛主動空氣懸架進行Matlab建模和仿真試驗。仿真結(jié)果表明,與車輛被動空氣懸架、常規(guī)PID控制的車輛主動空氣懸架相比,Fuzzy-PID控制的車輛主動空氣懸架可大大降低車身加速度和懸架動行程,提高車輛乘坐舒適性和操縱穩(wěn)定性,具有良好的魯棒性,從而驗證了Fuzzy-PID控制器的有效性和實用性。
關(guān)鍵詞:車輛工程;汽車行駛平版性;模糊控制;Fuzzy-PID控制器;主動懸架
隨著高速公路的日益發(fā)展,人們對汽車高速行駛時平順性和安全性的要求越來越高。良好的車輛懸架系統(tǒng)可以有效地降低由于路面不規(guī)則激勵造成過大車體加速度,使車輛具有良好的行駛平順性和安全性。自主動懸架的概念提出以來,人們已經(jīng)探求用各種控制理論算法設(shè)計主動懸架控制器。研究其在提高設(shè)計主動懸架中的應(yīng)用效果。
模糊邏輯基于人類模糊思維這一抽象機理,它強調(diào)的重點是應(yīng)用的簡單和方便。自20世紀60年代,模糊數(shù)學(xué)的建立為模糊推理系統(tǒng)尤其是模糊控制系統(tǒng)的應(yīng)用奠定了理論基礎(chǔ)。目前,模糊推理系統(tǒng)已成功應(yīng)用于自動控制、數(shù)據(jù)分類、決策分析、專家系統(tǒng)以及計算機視覺系統(tǒng)之中。
本文研究車輛主動空氣懸架的控制問題,在車輛主動空氣懸的常規(guī)PID控制器的基礎(chǔ)上,運用模糊推理對常規(guī)PID控制器進行參數(shù)在線修訂,控制策略融合了PID控制和模糊控制的優(yōu)點,設(shè)計了基于單輪車輛主動空氣懸架的Fuzzy—PID控制器,并對Fuzzy—PID控制的單輪車輛主動空氣懸架進行Matlab建模和仿真試驗。仿真結(jié)果表明,與車輛被動空氣懸架、常規(guī)PID控制的車輛主動空氣懸架相比,F(xiàn)uzzy—PID控制的車輛主動空氣懸架可大大降低車身加速度和懸架動行程,提高車輛乘坐舒適性和操縱穩(wěn)定性,具有良好的魯棒性,從而驗證了Fuzzy—PID控制器的有效性和實用性。
1 單輪車輛主動懸架和路面激勵
設(shè)計車輛懸架系統(tǒng)時,可把單輪車輛主動懸架模型(即單輪車輛模型)簡化成一個彈簧-阻尼系統(tǒng),該系統(tǒng)的力學(xué)模型如圖1所示。
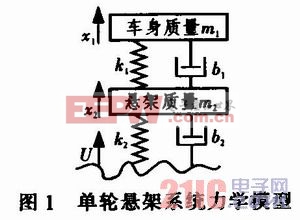
單輪車輛主動懸架的數(shù)學(xué)模型為:

式中,m1為車身質(zhì)量,m2為懸架質(zhì)量,x1為車身垂直位移,X2為懸架垂直位移,U為路面激勵,k1和k2為彈簧胡克系數(shù),b1和b2為阻尼系數(shù)。
路面不平度隨機激勵為:
![]()
式(3)中:no為參考空間頻率,Gq(no)為參考空間頻率下的路面功率譜密度,w(t)為白噪聲。

pid控制器相關(guān)文章:pid控制器原理










評論