基于模糊控制的水下潛器沉浮控制方法

針對EBP算法收斂速度慢的問題,采用Delta-Bar-Delta學習規則對學習速率進行在線調整,以提高收斂速度。
以αij為例,βij、γij同理:

其中,ξ是一個正實數,參數a、b、ξ根據實際情況自定。典型值為:10-4≤a≤0.1,0.1≤b≤0.5,0.1≤ξ≤0.7。
3 仿真分析
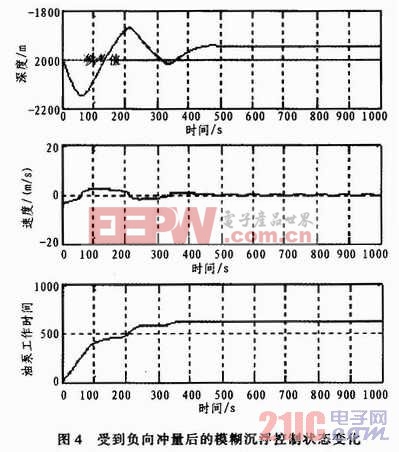
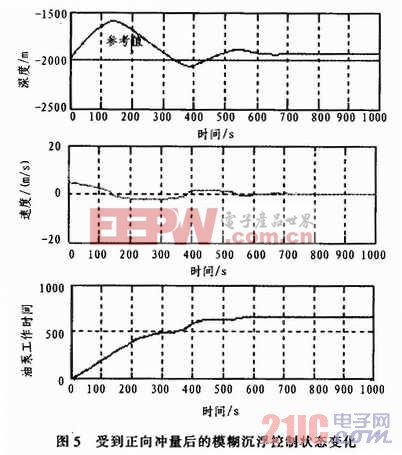
假定潛器在水下1 990 m處于懸浮平衡狀態,油泵充抽油率為10 N/S,突然受到一瞬時外力的擾動作用,使得潛器獲得了向上或向下的速度(12 m/s或-12 m/s)。利用計算機仿真潛器在基于自適應模糊控制方法下的沉浮控制效果,仿真效果如圖4、圖5所示。仿真結果表明:采用自適應模糊控制方法實現對水下潛器的自主沉浮控制是完全可行的,能夠在受到一定擾動的情況下仍保持定深懸浮的穩定狀態。本文引用地址:http://www.104case.com/article/161986.htm
4 結束語
良好的自動沉浮控制能力對于水下潛器來說是至關重要的,是保證水下潛器能夠進行正常工作的前提條件。由于水下潛器在水下的低速運動表現為耦合非線性,因此,水下潛器自動沉浮控制系統必然是一種慣性大、時滯、非線性的復雜控制系統。本文提出的基于模糊控制的沉浮控制方法從優化隸屬函數入手,采用多層前向神經網絡的誤差反向傳播(EBP)算法對它的參數進行在線修正,并采用Delta-Bar-Delta學習規則對學習速率進行在線調整,使EBP算法具有較快的收斂速度,同時避免了局部極小值問題,在實際工程中具有廣闊的應用前景。此外,隸屬函數的優化還可以考慮將神經網絡與其他智能方法相結合,以期能夠獲得更快的控制效果。















評論