關于深化應用智能巡檢機器人的方法研究
 加入技術交流群
加入技術交流群

掃碼加入
和技術大咖面對面交流
海量資料庫查詢
1 巡檢機器人簡介
變電站智能巡檢機器人是用于變電巡檢作業的移動巡檢裝置,主要由移動載體、通訊設備、檢測設備組成。智能機器人巡檢系統能夠以全自主、本地或遠方遙控模式代替或輔助人工進行巡檢,巡檢內容包括設備溫度、儀表等,具有檢測方式多樣化、智能化、巡檢工作標準化、客觀性強等特點。同時,系統集巡視內容、時間、路線、報表管理與一體,實現了巡檢全過程自動管理,并能夠提供數據分析與決策支持。[1]
2 機器人應用中存在的主要問題
變電站智能巡檢機器人在一定程度上能幫助我們巡視檢查設備,能夠減輕一部分運維人員的工作量,但是國內變電站巡檢機器人研發時間相對起步較晚,在實際應用中還存在一些技術問題需要優化,并且現場實際使用經驗也不是很豐富,導致機器人應用中存在較多問題,下面將對某變電機器人運行中存在的問題進行闡述。
2.1 機器人運行穩定性差
機器人目前主要通過激光導航來確定機器人在變電站中的位置,利用傳感器識別出道路區域和障礙物區域。機器人激光導航容易受環境影響,在實際應用過程中機器人多次出現了偏離巡視軌道問題,而且由于傳感器及算法問題,機器人容易將正常道路區域判斷為障礙物區域,待在原地,這樣就導致機器人常常有去無回。
在特殊天氣,當空氣中水分、雜質增加時,變電站電暈放電現象相應加重,若電暈放電源的頻率與機器人通訊頻率間距足夠接近,容易出現干擾,導致機器人通訊中斷,圖片傳輸不清晰等問題。
2.2 機器人巡檢質量不高
機器人雖然已搭載了較好的紅外測溫攝像頭,但由于變電站環境背景相對復雜,機器人拍攝的部分圖片仍不清晰,并且在拍攝中極易受到太陽的干擾,拍攝的紅外圖片,在后期的應用分析上存在較多問題;機器人相對較小,拍攝的角度相對較低,而且容易受遮擋,雖然從多個角度都觀測設備,但是路線相對固定,對設備某些部位的發熱拍攝不到,即使能拍到,由于觀測角度的不同與實際溫度誤差還是較大。[2]
機器人目前對標記的識別極易受光線和拍攝位置的影響,標記的綜合識別能力還需提升,對目前所轄變電站機器人巡檢數據而言,對于SF6 標記及避雷器示數的識別率可以達到95% 左右,準確率可以達到90% 以上,但隨著機器人投運后使用時間不斷增加及標記老化,巡檢結果的識別率及準確率呈下降趨勢;而對于充油設備油位的識別能力低于70%,準確率較低,誤差較大。
2.3 巡檢數據利用率低
機器人后臺巡檢系統對數據的分析告警不準確,后臺報警信息都是大量的無用告警信息,設備實際狀態正常;機器人巡檢數據導出后無法使用,與目前使用的五通巡視模板不同;機器人目前的巡檢結果報表只是作為輔助,目前無法真正的代替人工巡視。[3]
機器人目前能對標記及紅外測溫有效識別和分析,但是對于設備外觀缺陷、設備上懸掛的異物、設備漏油等問題無法識別,功能需要完善。
變電站智能巡檢機器人在實際使用中遇到了一些問題,這些問題導致機器人使用效率不高,機器人應用得不夠深,無法將機器人的作用發揮到最大化。下面將闡述深化應用機器人的基礎方法。
3.1 安裝調試因地制宜
機器人初期設計道路時,要根據設備位置修建道路,道路不僅要在施工質量上符合平整堅固的要求,更重要的是滿足所有設備點位需求,道路修建時要以機器人觀測角度考慮道路與設備的距離,盡可能地避免機器人觀測視角被遮擋。機器人選擇拍攝點位時,應根據不同設備特點來選擇機器人位置,例如對隔離開關動靜觸頭的拍攝,要根據運維人員平日測溫經驗來選取機器人拍攝角度,要使機器人能拍攝到相對隱蔽部位的發熱,這樣能保證機器人的檢測數據相對可靠和全面。
3.2 驗收過程質量為首
機器人在驗收過程中要把好質量關,要確保機器人各項功能正常,各傳感器工作正常,有沒有傳感器誤告警導致機器人無法移動的情況;要反復驗證機器人在執行任務過程中的穩定性,記錄好機器人偏離導航軌道次數,及時督促廠家查找原因并整改;在驗收巡檢點位時應觀測同一點位不同時期的巡檢數據,進行對比判斷機器人拍攝數據準確度及穩定性,對有時能準確識別有時識別不準的設備,要進行優化,確保每個巡檢點位數據都是準確的,這樣可以保證機器人后期運行的穩定性及巡檢數據的準確性。
3.3 現場環境定期勘查
機器人目前使用的激光導航攝像頭,可能會因為周圍環境的變化,而使導航出現偏差,因此要經常評估周圍環境變化情況,如果變化大時,應重新掃激光地圖更新至數據庫;機器人在行駛過程中可能會由于壓到石子發生偏移而導致偏航,或者因為雜草、樹枝等而告警,因此巡檢道路上的異物要及時清理,對于不平整路面要及時修整,電纜溝有工作時應暫停執行任務,這樣可以有效避免機器人常常有去無回的問題,提高機器人運行穩定性。
3.4 巡檢任務合理計劃
機器人的巡檢任務不易太長,盡量設置一個任務在8 小時內,這樣即使巡檢過程中遇到異常問題,還留有足夠的電量讓機器人返回充電房,在后期機器人應用中發現機器人多次因為電量不足問題沒有返回充電房;對于自動任務的設計應盡量避免重疊,給機器人留有足夠的充電時間,按照合理計劃執行巡檢任務,可以大大提高機器人使用效率。
3.5 多舉并措彌補不足
對變電站的設備標記較密集、標記遮擋嚴重、電磁干擾、標記臟污等問題,可以通過加裝反光鏡、巡視路線調整、標記擦拭等措施,進一步提升標記覆蓋率和識別率。在后期變電站建設過程中為提高機器人巡檢效率,應將設備標記朝向便于機器人觀測的位置。
3.6 異常處理規范高效
機器人目前在出現異常時,廠家無法及時的到現場處理解決,在此期間機器人停運,極大地降低了機器人的使用率。變電站應建立規范的機器人異常處理流程,將機器人的典型問題處理流程整理成冊,由運維人員學習處理,這樣可以縮短異常處理時間,提高機器人使用效率。
機器人的深化應用還要從機器人本身存在的問題進行解決,對機器人本身無法解決的問題應與其他設備相聯系,構建類似于物聯網的協同聯動機制,互相配合,達到深化應用機器人的目的。
4.1 監控系統與機器人聯動
對于機器人觀測不到的一些設備,可由視頻監控系統來拍照,照片發送至機器人識別處理,或建立后臺數據處理系統來識別。在目前正是建設一鍵順控的時期,智能巡檢機器人提供與站內監控系統和信息一體化平臺接口,能夠與監控系統協同聯動。在設備操控和事故處理時,通過最優路徑規劃自動移動到目標位置,實時顯示被操作對象的圖像信息,將極大地縮短現場人員工作量。
4.2 優化機器人導航方式
機器人偏航問題,是目前無軌道機器人應用過程中存在的主要問題,但是目前以普遍采用的激光導航為例,容易受周圍環境變化影響,即使廠家不斷地在優化和更新算法,但都沒有徹底解決機器人偏航問題。機器人在巡檢過程中常常遇到拐彎問題,而機器人在對于拐彎處點位選擇十分重要,早或遲都可能導致機器人脫軌,機器人系統自帶有里程記錄功能,但是精度較差,可以單獨加裝精度高的里程表用于輔助機器人導航,變電站機器人巡檢路線相對固定,從一個點到另一個點的里程也固定,可以設定從一個拐彎處到另一個拐彎處為固定里程,作為激光導航的參考,到達這個里程后激光導航進行位置微調與判斷然后進行轉彎;同時也可考慮激光導航與GPS 導航相配合,GPS 導航負責大的方向指引,激光導航負責局部位置調整,兩者互相協調,可以改善機器人偏航問題。
4.3 運用遠程集控系統
目前,機器人任務的派發和管理都是現場人員到各站去執行,目前,很多變電站都是無人值守變電站,如果運維人員不去現場,機器人的運行狀況及巡檢數據無法獲取。如果運用智能巡檢機器人遠程集控系統,在運維主站實現多個變電站機器人系統的統一協調和集中控制,將極大地方便機器人的運行和管理,并且在特殊天氣,運維人員無法到站巡視時,可在運維站利用機器人遠程巡視,實時掌握設備運行情況,為變電站無人值守模式的推廣打下堅實的基礎。

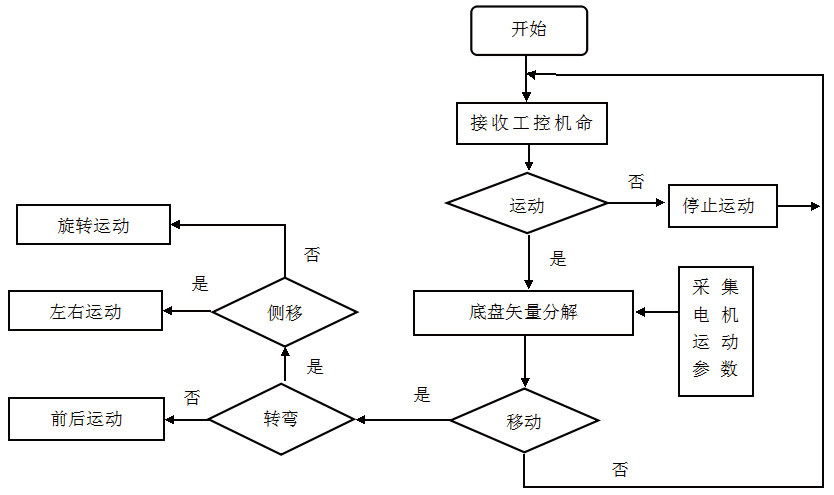
圖1 變電站智能巡檢機器人遠程集控系統圖
4.4 建立數據綜合分析系統
針對目前巡檢數據利用率低問題,可以建立一個集中的數據綜合分析系統,將各變電站的數據都匯總起來,由數據綜合分析系統進行處理,該系統存有較完整的缺陷定義標準,具有歷史數據對比,三相對比,設備部位對比等功能,能夠綜合判定設備狀況是否正常,對有缺陷的設備能夠準確判斷缺陷等級,生成缺陷報告;對于巡檢數據該系統可以自動生成五通模板的巡視卡直接使用,巡檢結果可以經數據綜合分析系統處理后上傳至PMS 系統里對應的巡視維護項目內;每年各個變電站都要進行精確紅外測溫圖庫拍攝及紅外測溫報告報告制作,為此付出了較多的精力,如果通過數據綜合分析系統對機器人上傳的紅外圖庫照片進行分析處理,生成精確紅外測溫報告,將會節省較多的人力,此系統的使用能夠極大的減小生產一線人員的工作壓力,達到機器人代替部分人工巡視的目的。
5 總結
智能巡檢機器人的應用有較大的前景,雖然在目前實際應用中存在較多問題,但隨著對智能巡檢機器人的優化和改進,機器人的應用范圍會更加廣泛,能夠真正地代替人工巡視,輔助人們遠程進行設備故障的處理。
參考文獻:
[1] 董吉文,馮立強,魯守銀.變電站巡檢機器人控制系統設計[J].微計算機信息,2013,(5).
[2] 魯守銀,蘇建軍.機器人在變電站設備巡檢中的應用[J].機器人技術與應用,2014,(5).
[3] 周立輝,張永生,孫勇,梁濤,魯守銀.智能變電站巡檢機器人研制及應用[J].電力系統自動化,2011,(19).
(本文來源于《電子產品世界》雜志2022年4月期)








評論