基于紅外光電傳感器的智能尋跡小車設計

2.5 車速檢測模塊
為了使智能車能夠快速平穩地跟蹤引導線運行,除了要控制前輪轉向舵機外,還需要控制車速,以便調整智能車在直道和彎道上的行駛速度。微控制器通過車速檢測模塊獲取智能車的實時速度并給予電機驅動模塊反饋信號,以實現對智能車車速度的閉環控制。
系統采用霍爾傳感器進行車速檢測,霍爾車速傳感器由8級磁鋼、UGN-3030T型霍爾開關傳感器、LM2917及放大電路組成。將自制的沿圓周均勻嵌入8粒磁鋼片的圓盤,固定在智能車后輪軸上,智能車運行時,車輪每轉動一周,由于磁場變化使得霍爾傳感器產生8個脈沖信號,經放大電路處理輸出到頻率/電壓轉換器LM2917,由MC9S12DG128B的A/D轉換器根據LM2917輸出電壓即可計算出當前智能車車速。
2.6 液晶顯示模塊
液晶顯示模塊用來實時顯示當前車速。系統選用字符型液晶顯示屏1602來顯示數據,1602和單片機的接口十分簡單,SD0~SD7為數據端,EN為使能端,RW為讀/寫選擇端,RS為數據/命令選擇端。
2.7 電源模塊
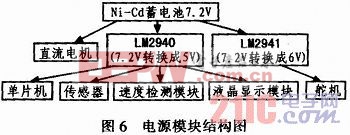
電源模塊為智能車系統的其他電路模塊提供穩定的直流電源,它的好壞關系到整個系統是否能夠正常工作,因此電源模塊的設計十分重要。系統采用7.2 V 2 000 mAh Ni-Cd電池進行供電,但由于電路中的不同電路模塊所需要的工作電壓不同,因此電源模塊應該包含多個穩壓電路,將充電電池電壓轉換成各個模塊所需要的電壓。
MC9S12DG128B的工作電壓為5 V,光電傳感器的工作電壓為5 V,直流電機的工作電壓為7.2 V,舵機的工作電壓為6 V,速度檢測模塊的工作電壓為5 V,液晶顯示模塊的工作電壓為5 V。故需將7.2 V電壓轉換成6 V和5 V。
系統選用LM2941穩壓芯片將電壓轉換成6 V給舵機供電,選用低壓差線性穩定器LM2940將電壓轉換成5 V給MC9S12DG128B單片機、光電傳感器、速度檢測模塊、液晶檢測模塊供電,直流電機直接由電池供電,電源模塊結構圖如圖6所示。
3 結語
本文對基于紅外光電傳感器的智能尋跡小車系統進行了分析與設計。著重介紹了智能車的控制器模塊、路徑識別模塊、電機驅動模塊、舵機驅動模塊、車速檢測模塊、液晶顯示模塊以及電源管理模塊等七部分的硬件電路設計,并給出了部分模塊的控制框圖及軟件流程圖。實際結果表明,該小車可以快速平穩地實現尋跡功能。












評論