基于紅外光電傳感器的智能尋跡小車設計

2.2 路徑識別模塊
單片機通過路徑識別模塊對路徑信息進行采集,以實現小車尋跡的功能。系統選用RPR220型紅外反射式光電傳感器設計了路徑識別模塊。RPR220是一種一體化反射型光電探測器,其發射器是一個砷化鎵紅外發光二極管,接收器是一個高靈敏度硅平面光電三極管。紅外發射管發出的紅外光在遇到反光性較強的物體(表面為白色或近白色)后被折回,并被光電三極管接收到,引起光電三極管光生電流的增大,將這個變化轉為電壓信號,就可以被處理器接收并處理,進而實現反光性差別較大的兩種顏色(如黑自兩色)的識別。
光電傳感器檢測電路原理圖如圖2所示,當發光二極管發出的光被反射回來被接收管接收時,三極管導通,此時構成電壓比較器的LM324的同相輸入端電壓約為0,LM324的反相輸入端電壓取決于可調電阻R3的有效阻值,當同相輸入端的電壓低于反相輸入端的電壓時,LM324輸出高電平,即Out為1,反之當發光二極管發出的光沒被反射回來時,LM324輸出低電平,即Out為0。電壓比較器的靈敏度可以通過調節可調電阻R3來實現。本文引用地址:http://www.104case.com/article/161675.htm
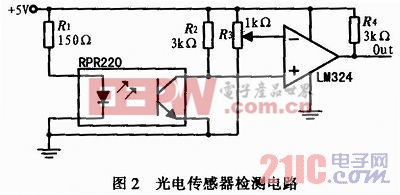
智能車采用8對RPR220型紅外光電傳感器作為路徑識別元件,將其等間距安裝在智能車前部的傳感器板上,間距約為25 mm。在一定的對地垂直高度下,由于白色賽道和黑色引導線對于紅外線的反射強度不同,不同位置處紅外接收管接收到的紅外光強會存在較大差異。因此通過單片機讀取LM324的輸出電平就能檢測出黑線位置,從而判斷行車方向。
2.3 電機驅動模塊
系統選用工作電壓為直流7.2 V的RS-380直流電機提供動力,電機驅動模塊是控制小車驅動電機加速運行與減速制動的核心,因此驅動芯片的選擇十分重要。系統選擇了飛思卡爾公司的MC33886集成H橋驅動芯片。作為一個單片電路H橋,MC33886是理想的功率分流直流電機和雙向推力電磁鐵控制器。它工作電壓從5~40 V,能夠控制連續感應直流負載上升到5.0 A,PWM信號頻率可達10 kHz;內部集成短路保護、欠壓保護、過溫保護等模塊,安全性高;兩路獨立輸入控制兩個半橋的推拉輸出電路的輸出,兩個無效輸入使H橋產生三態輸出。
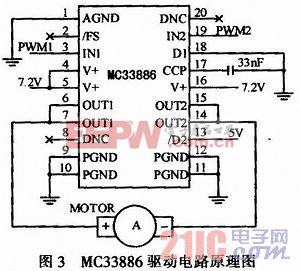
MC33886驅動電路原理圖如圖3所示,將單片機的兩路PWM輸出接到MC33886芯片的IN1、IN2腳,通過改變兩路PWM波的占空比控制電機兩端電壓,調節直流電機轉速的快慢,從而實現正轉、正轉制動、反轉、反轉制動。












評論