基于多傳感器信息融合的球磨機負荷檢測系統

信號處理一般包括信號的預處理、A/D轉換和數字信號處理器的數字信號處理等。其中,對于要檢測的聲響和振動信號,是隨機的混有多種噪聲信號在內的復雜的時域信號。然而球磨機不同負荷參數的變化往往引起聲響和振動信號頻率結構的變化,為了通過所檢測的信號得到球磨機內部負荷參數,往往需要了解信號的頻域信息。所以,需用快速傅立葉變換(FFT) 對聲響和振動信號進行頻譜分析,計算其反映球磨機內部負荷參數的狀態和特征信息。
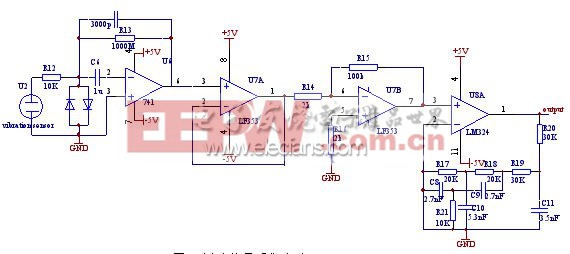
圖2 振動信號采集電路
(3)數據層融合
由于磨礦過程機理復雜、影響因素多,又是一個多變量輸入輸出過程,生產過程緩慢,滯后時間長,同時具有非線性、時變性以及干擾因素多而嚴重等特點。此外,球磨機機組龐大,噪聲高達100dB。在這種相當惡劣的工作環境下,如果用傳統的單一傳感器來觀測球磨機的外部響應信息,顯然是難以勝任的。所以,基于信息融合的多傳感器觀測手段在這里是個很好的應用方案。分別通過聲音傳感器、振動加速度傳感器和有功功率傳感器進行球磨機外部響應信號的數據采集,經信號處理后提取的這三個參數在數據層融合,可以增強獲取的球磨機外部響應信息的冗余性和互補性,減少整個系統的不確定性;當某個傳感器失效時,多個傳感器提供的冗余信息則可以排除故障信息,從而提高系統的魯棒性。
因為融合是在信息的最低層次進行的,傳感器原始信息的不確定性、不完全性和不穩定性,以及數據通信量較大,抗干擾能力較差等,決定了融合時算法需有較高的糾錯能力,實時處理大量數據的能力等。神經網絡作為一種并行的分布式信息處理系統,具有很強的信息綜合能力,知識泛化能力及結構的容錯性等,可以在數據層用作融合算法。
(4)融合算法設計
本文是要通過檢測球磨機的外部響應來間接地檢測球磨機的內部負荷參數,即球磨機外部響應是已知的,球磨機內部參數是待預測的。因此,可以在數據層,通過神經網絡建立球磨機系統的逆向模型——球磨機外部響應與內部負荷參數之間的關系模型,從而進行球磨機負荷的預測。
本文神經網絡選用有教師學習的標準三層結構的徑向基函數RBF網絡,輸入變量是數據層的球磨機外部響應,輸出變量是球磨機的內部負荷參數。
① 輸入層的設計
由于RBF神經網絡模型的輸入變量是球磨機的外部響應信號,根據三因素檢測的要求,本文檢測了球磨機的外部聲響信號、外部振動信號和有用功率信號這三個因素,所以輸入層節點有三個,分別是歸一化處理后的球磨機的外部聲響信號、外部振動信號和有用功率信號。
② 輸出層的設計
RBF神經網絡模型的輸出變量是球磨機的內部負荷參數,由于本文要檢測的球磨機內部負荷參數包括球磨機的介質充填率、料球比和磨礦濃度,所以,以介質充填率、料球比和磨礦濃度作為輸出變量建立神經網絡系統。這樣,輸出層有三個節點,輸出層的激活函數是簡單的求和運算,即輸出層是隱層輸出的加權和。
③ 隱層的設計
在RBF網絡訓練中,隱含層神經元數量的確定是一個關鍵問題,MATLAB7提出了改進方法,基本原理是從0個神經元開始訓練,通過檢查輸出誤差使網絡自動增加神經元。每次循環使用,使網絡產生的最大誤差所對應的輸入向量作為權值向量,產生一個新的隱含層,然后檢查新網絡的誤差,重復此過程直到達到誤差要求或最大隱含層神經元數為止。實現是:函數newrbe在創建RBF網絡時,自動選擇隱含層的數目,使得誤差為0,完成網絡的訓練和建立(RBF神經網絡的建立過程就是訓練過程)。
RBF神經網絡輸出層三個神經元上的數據經過反歸一化處理后,就為球磨機的內部負荷參數:介質充填率、料球比和磨礦濃度。
在磨礦過程自動控制中,可以根據這三個參數間接反映的球磨機的負荷(包括球負荷、物料負荷以及水量的各自數值)實現整個球磨機的優化控制。












評論