一種多視覺傳感器控制系統的實現

1 引言
本文引用地址:http://www.104case.com/article/161509.htm 結構光傳感器是應用較早、發展較成熟的視覺傳感器,因此本系統采用結構光傳感器來采集圖像并經圖像采集卡送給計算機處理。由于視覺傳感器在視覺測量中擔負著視頻圖像信號(測量數據)的采集、切換與傳輸。因此,如何讓視覺傳感器測控系統快速、精確地獲得理想的視頻圖像信息,進而為后期的圖像處理提供可靠的支持,亦即視覺傳感器的測控系統的設計顯得尤為重要。
2 視覺系統的概述
視覺檢測系統中采集被測物體圖像的視覺傳感器有單目和雙目兩種之分,本測控系統可以使用單目視覺傳感器也可以使用雙目視覺傳感器來采集數據,本文主要討論由多個雙目視覺傳感器組成的多視覺傳感器測控系統,其中的每個視覺傳感器采用的是目前技術已經比較成熟的線結構光視覺傳感器,其結構是由雙CCD攝像機、一個激光投射器和一塊MCU控制電路組成,基于立體視差原理,利用兩臺攝像機來模仿實現人眼的功能,利用空間點在兩攝像機像面上的透視或像點坐標來求取空間點的三維坐標。當被測工件較大需要不止一個視覺傳感器時,上述多個視覺傳感器加上多路視頻切換開關就構成了多視覺傳感器測控系統。如對汽車車身上的很多特征點進行檢測時,就需要幾十甚至上百個傳感器來測量,由于控制器局部網CAN(controller area network)總線具有很強的帶負載能力,一個CAN網絡上最多能接110個節點,所以本系統采用CAN總線進行通訊和網絡控制。
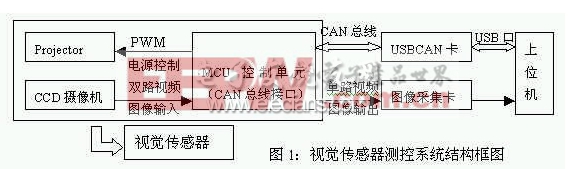
視覺傳感器中MCU控制電路提供CCD攝像機、激光投射器的電源并且控制著它們的開啟與關閉,為避免激光投射器使用時間過長激光器發熱引起線結構光光能分布不穩從而影響測量精度,當傳感器開始測量時,先上電初始化,再打開激光器,測量完畢后即關閉以延長投射器壽命。
本系統中,上位機為PC機,下位機為8051單片機控制單元,上、下位機之間用CAN總線進行通訊,由于PC機中并不帶CAN總線接口,因此必需一個CAN接口卡,這里選用廣州周立功公司的USBCAN智能接口卡來通信,因其具有體積小、外置且即插即用等特點。這樣,PC可通過USB總線方便地連接至CAN總線網絡控制各個CAN節點進行數據采集和處理。USBCAN智能CAN接口卡可以與ZLGCANTest通用CAN-bus測試軟件連接運行,執行CAN-bus總線數據的接收、發送測試任務,較易于實現CAN-bus產品開發和數據分析。USBCAN智能CAN接口卡采用周立功公司提供的通用的ZLGVCI驅動庫,支持WIN98、2000和XP操作系統并支持Linux平臺。用戶通過接口卡提供的ZLGVCI動態開發庫可以方便快捷的開發出CAN系統應用產品。為了把模擬CCD相機輸出的被測物體的模擬視頻圖像轉換成數字信號并由計算機進行處理,這里采用了北京大恒圖像公司的CG400型圖像采集卡,其采用PCI總線,所采集的圖像數據傳輸基本不占用CPU時間,并可將圖像直接傳送的計算機內存或顯存。
3 CAN總線簡介
CAN總線是德國BOSCH公司從80年代初為解決現代汽車中眾多的控制與測試儀器之間的數據交換而開發的一種串行數據通信協議,它是一種多主總線,通信介質可以是雙絞線、同軸電纜或光導纖維。通信速率可達1Mbps。CAN總線通信接口中集成了CAN協議的物理層和數據鏈路層功能,可完成對通信數據的成幀處理,包括位填充、數據塊編碼、循環冗余檢驗、優先級判別等項工作。CAN協議的一個最大特點是廢除了傳統的站地址編碼,而代之以對通信數據塊進行編碼。采用這種方法的優點可使網絡內的節點個數在理論上不受限制,數據塊的標識碼可由11位或29位二進制數組成,因此可以定義211或229個不同的數據塊,這種按數據塊編碼的方式,還可使不同的節點同時接收到相同的數據,這一點在分布式控制系統中非常有用。數據段長度最多為8個字節,可滿足通常工業領域中控制命令、工作狀態及測試數據的一般要求。同時,8個字節不會占用總線時間過長,從而保證了通信的實時性。CAN協議采用CRC檢驗并可提供相應的錯誤處理功能,保證了數據通信的可靠性。CAN卓越的特性、極高的可靠性和獨特的設計,特別適合工業過程監控設備的互連,因此,越來越受到工業界的重視,并已公認為最有前途的現場總線之一。
為了滿足大尺寸物體的三維輪廓的檢測,本系統要求最少能帶64個傳感器,每個視覺傳感器里有兩個攝像機,即共有128路視頻輸入,而任一時刻系統只選取其中一路視頻圖像傳給計算機進行圖像采集處理,如對汽車車身周圍布置了幾十個傳感器來檢測車身上關鍵尺寸如擋風玻璃窗尺寸、車門安裝棱邊縫隙、定位孔位置,測量其相應的棱邊、孔表面的空間位置尺寸。視覺傳感器可以按要求順序進行工作,也可以選取被測對象的特定點并通過CAN控制網絡選擇特定傳感器來檢測,計算機采集檢測點圖像并進行處理,將計算值與標準值比對,從而得出視覺檢測的結果。












評論