基于C8051F020的假肢控制系統設計

假肢是人體缺損肢體的替代物,用以彌補缺損肢體的形狀和功能。本文針對失去整個手臂的情況,設計出一種仿人手臂形假肢的控制系統。使用者可以補償部分缺失的功能,達到生活自理甚至于可以從事基本勞動,減少身心痛苦,同時也相應地解放了護理工作用。在設計中,采用C8051F020[1]單片機作為主控制器,并通過CPLD(Complex Programmable Logic Device)完成對各個關節控制量的檢測以及凌陽61單片機實現語音控制功能。
1 機器人假肢結構
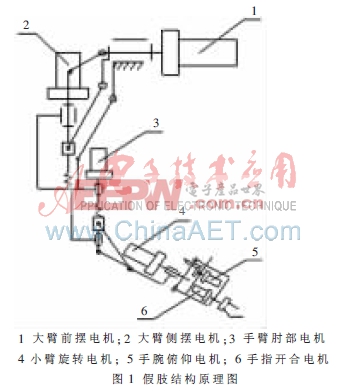
多自由度機器人型假肢(上肢)擁有6個自由度,其結構原理圖如圖1所示。
2 假肢控制系統的硬件設計
2.1 控制器的工作原理
控制系統原理框圖如圖2所示,主要由控制、驅動、被控對象和檢測反饋四個部分構成。控制部分主要由C8051f020完成;驅動部分由6個電機驅動器構成;被控對象即是六自由的假肢;檢測反饋部分主要由CPLD檢測目標位置各個關節的控制量。系統主要采用按鍵控制和語音控制兩種控制方式。

2.1.1 按鍵控制
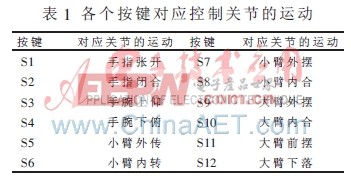
系統采用了12個獨立式按鍵對6個電機正反方向轉動的控制,電機的轉動驅動著各個關節進行運動。各個按鍵對應控制關節運動情況如表1所示。
2.1.2 語音控制
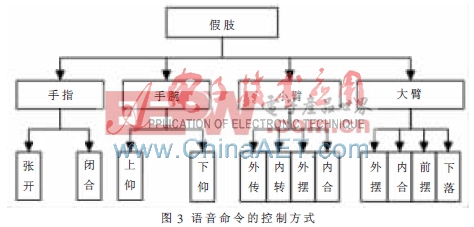
語音識別模塊由SPCE061A單片機完成。首先,對各個命令進行訓練,并將訓練結果保存下來。在系統運行過程中,當SPCE061A單片機識別出某條命令時,它會通過串口給C8051F020發送指令,當C8510F020接收到相應的指令時,控制相應的關節做相應的運動[2]。例如:當SPCE061A識別出“手指張開”命令時,將會通過串口發送如“0x10”的十六進制的數,當C8051F020通過串口接收到“0x10”后,就會控制手指做張開運動。其他關節控制亦如此。其語音命令的控制形式如圖3所示。














評論