基于直驅型PMSG風力發電系統的變槳自抗擾控制

3 仿真結果
3.1 仿真參數
仿真參數如表1所示。本文引用地址:http://www.104case.com/article/161144.htm
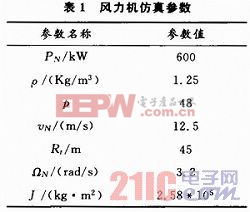
自抗擾控制器參數取a0=0.5,a1=0.25,a2=1.2,β0=1,β1=100,β2=1,β01=10,β02=-10,δ=0.5取采樣步長為0.01。
3.2 仿真結果
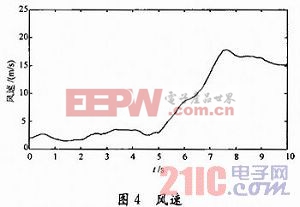
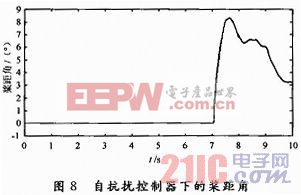
仿真結果輸出如圖4~圖8所示。
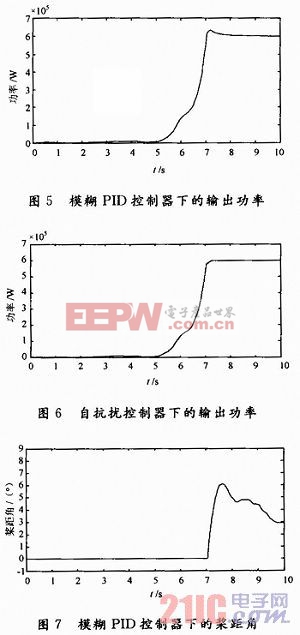
比較圖5和圖6可以看出,陣風作用時,模糊控制器在7~8 s出現6%左右的超調,8 s以后才達到穩態值;自抗擾控制器能很好地抑制超調,7 s左右即達到穩態值,能快速控制槳距角,很好地維持恒功率輸出。
4 結語
本文簡單分析了永磁直驅風力發電系統的結構和特性,以及變槳距的功率控制方法、自抗擾控制器,并對控制器進行設計和仿真。仿真結果表明,基于自抗擾控制算法的控制器能有效地對風力機槳距角進行控制,可實現系統的恒功率輸出,為進一步研究永磁直驅風力發電系統的功率控制奠定了基礎。

pid控制器相關文章:pid控制器原理







評論