式中:控制輸出△βREF的系數K難以得到確切值,可以取其估計值K0,將錯估部分歸為系統擾動。取:

基于式(14)設計自抗擾控制器實現風電系統變槳距調節。以△P為量測輸入構造擴張狀態觀測器,有:
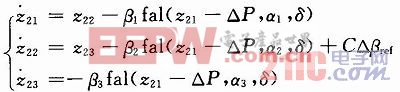
式中:z21,z22為系統狀態變量觀測值;z23對應系統擾動觀測值。

取功率反饋得出狀態誤差,構成非線性控制律計算控制量:
 本文引用地址:http://www.104case.com/article/161144.htm
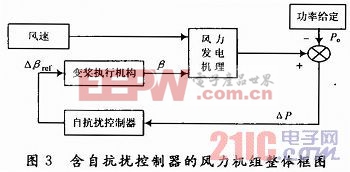
本文引用地址:http://www.104case.com/article/161144.htm 圖3為變槳距自抗擾控制器的風力機組整體框圖。其中:△P為自抗擾控制器輸入;△βref為控制器輸出,實現變槳距控制。
pid控制器相關文章:pid控制器原理









評論